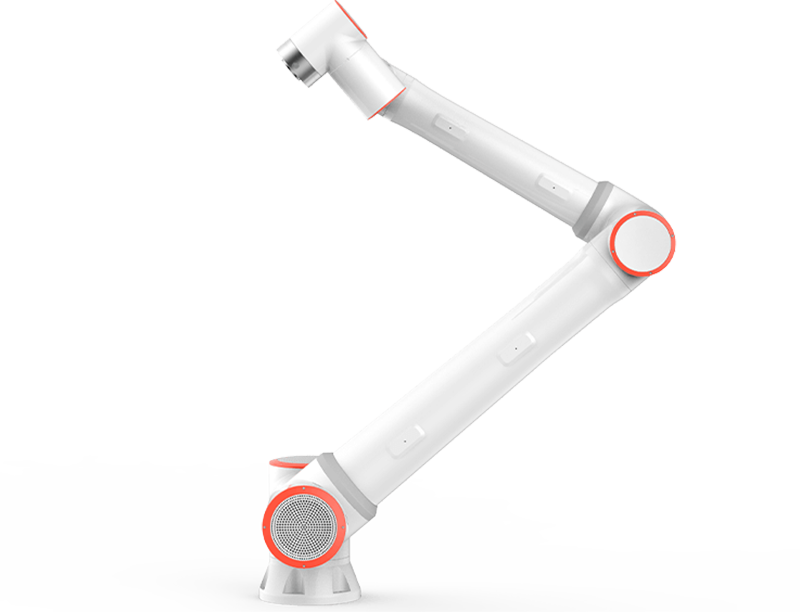
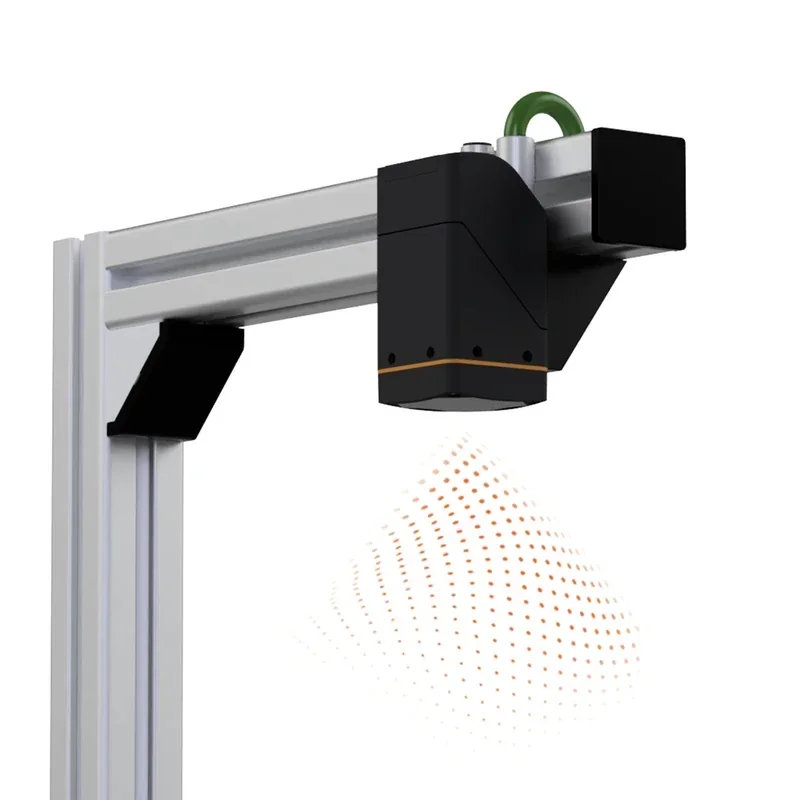
The FAIRINO FR20 is a 6-axis collaborative robot with a payload of 20 kg (25 kg max), 1,854 mm reach, and ±0.1 mm repeatability (ISO 9283). It’s built for heavy-duty tasks like palletizing, welding, screw-tightening, and material handling requiring long reach and high payload. Key features include an open development stack (WebAPP, SDKs for C#/C++/Python, ROS/ROS2), broad certifications (ISO 10218/13849/15066; CE, KCs, NRTL, RoHS 2.0), and IP54 protection (IP65 optional). The FR20 supports any mounting orientation and flexible integration via tool I/O and optional fieldbuses (CC-Link, PROFINET, EtherNet/IP, EtherCAT).
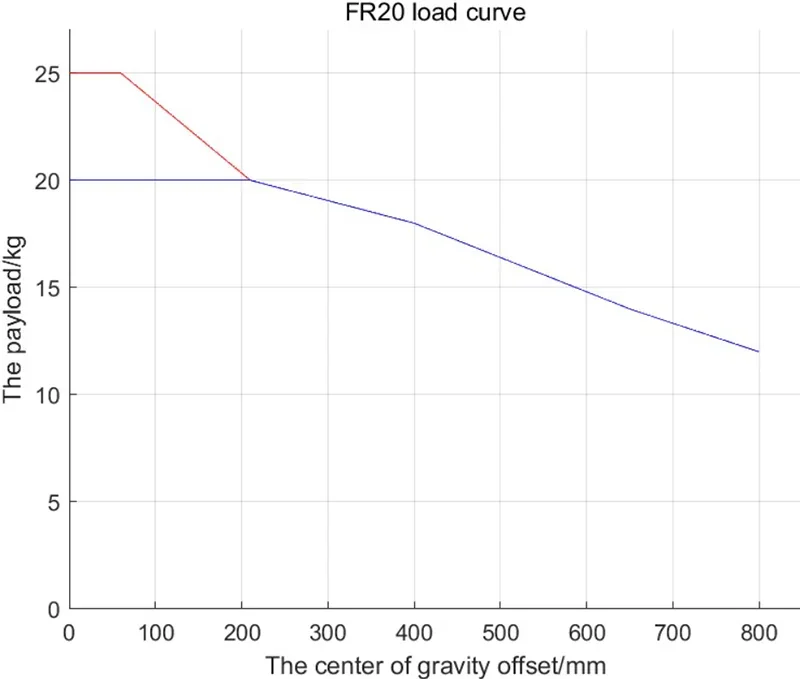
The FR20 handles a 20 kg payload, with a 25 kg max per its load curve. The effective limit depends on the payload’s center of gravity relative to the flange.
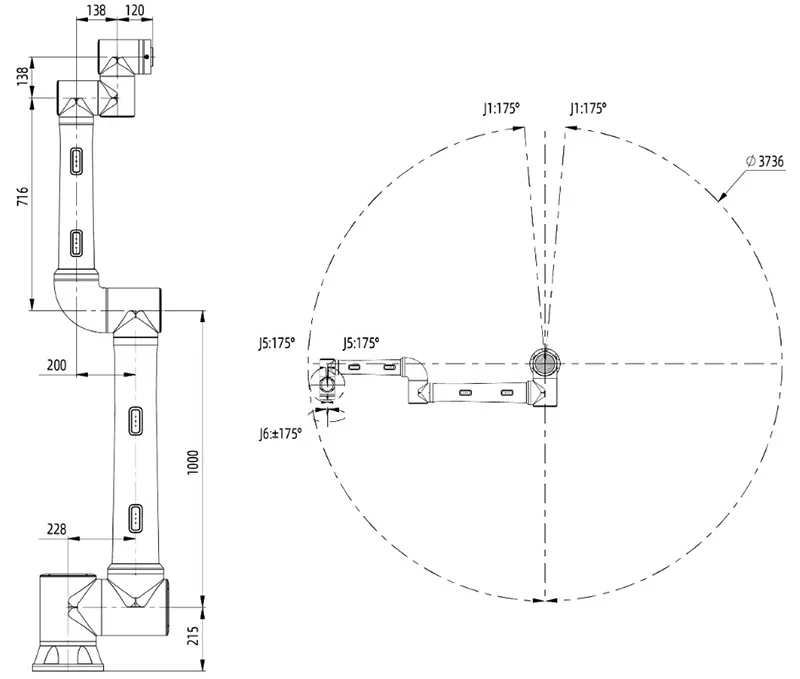
The FR20 has a 1,854 mm max TCP reach, with joint limits of: J1 ±175°, J2 +85°/−265°, J3 ±160°, J4 +85°/−265°, J5 ±175°, J6 ±175°. Some singular poses, like a fully contracted elbow or parallel wrists, are mechanically unreachable, limiting edge-case positions.
The FR20 offers ±0.1 mm repeatability (ISO 9283) for precise handling. TCP speed reaches 2 m/s, with joint speeds of ±120°/s (J1–J3) and ±180°/s (J4–J6), enabling fast, smooth motion. Acceleration is user-adjustable (0–100%) to match industry application needs without compromising path quality.
The FR20 controller supports joint, linear, and circular moves (MoveJ/MoveL/MoveC/Circle) with real-time B-spline planning for smoother, low-jerk paths. Cornering uses configurable blending with a 0–1000 mm smooth radius and Acceleration Smooth Mode to maintain continuous motion and minimize settling.
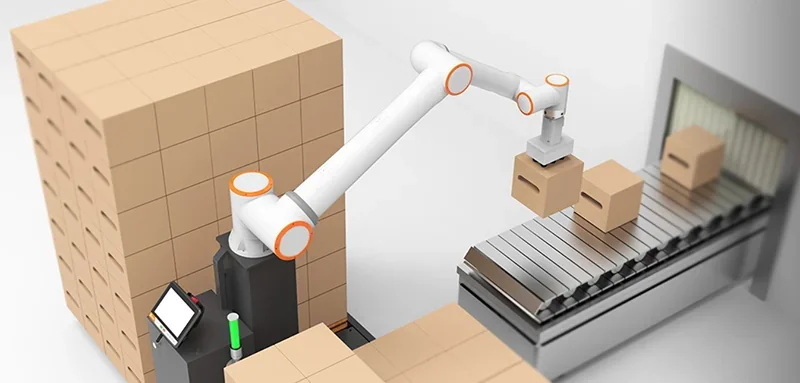
Example: Palletizing Solution
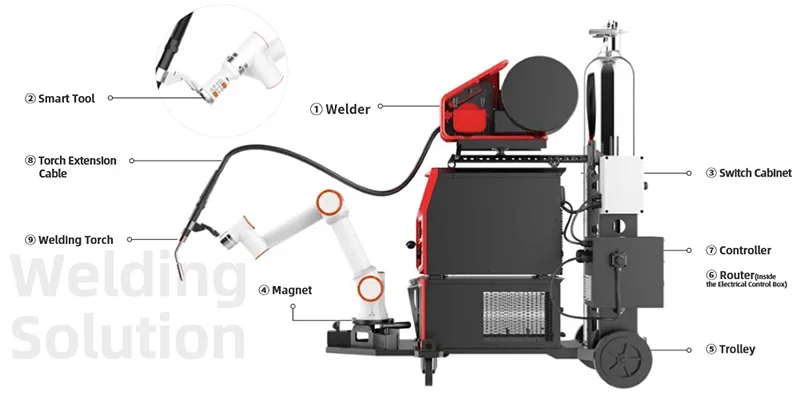
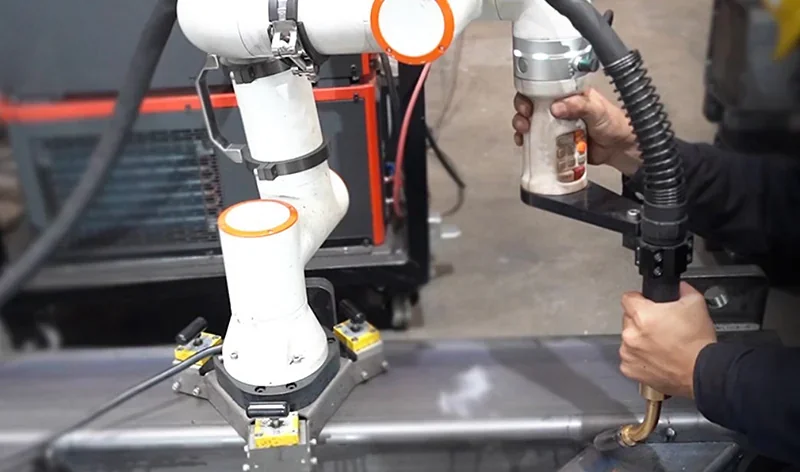
Example: Welding Scenario
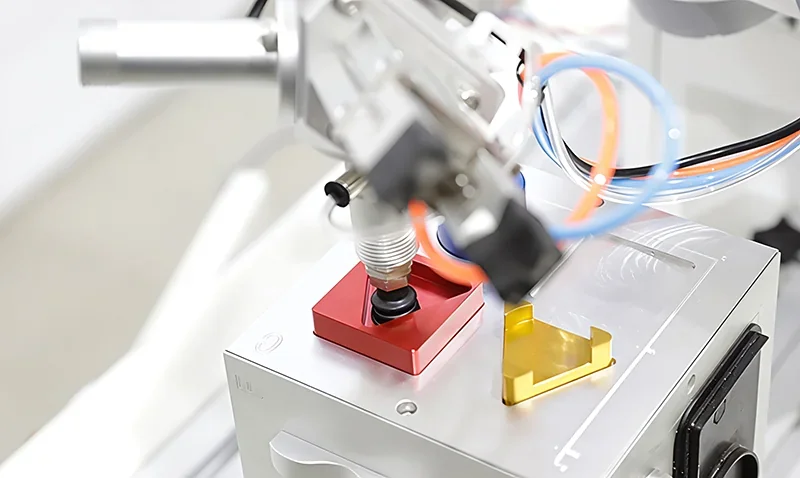
Example: Plasma Cutting
Example: Healthcare

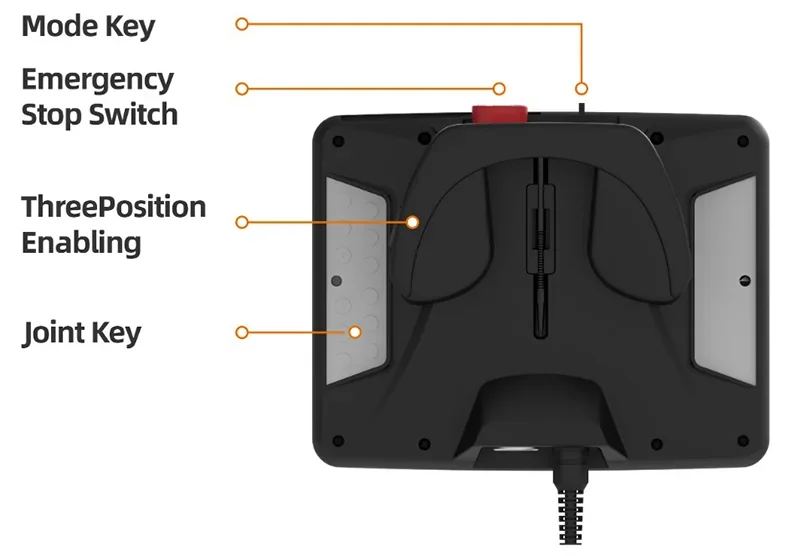
The FR20 has hardware E-stops on the button box and teach pendant that cut joint power and trigger an emergency stop. Category-0 stop times range from 170–700 ms and distances from 0.22–0.80 rad, measured with the arm fully extended at full speed (180°/s) and max load.
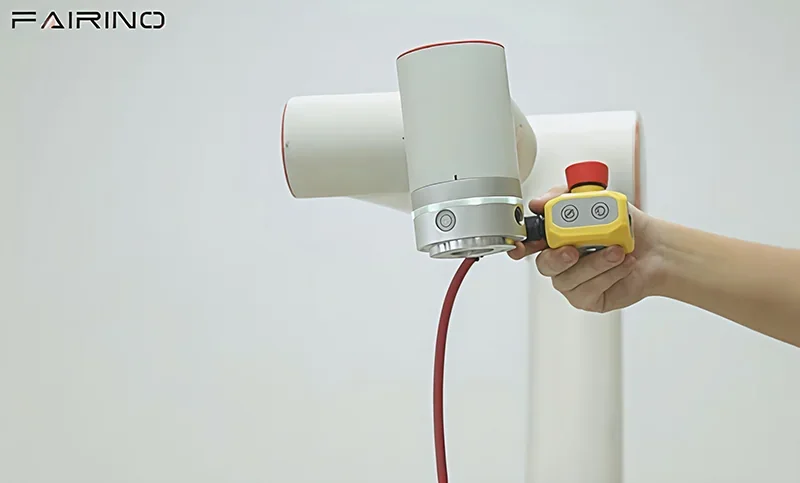
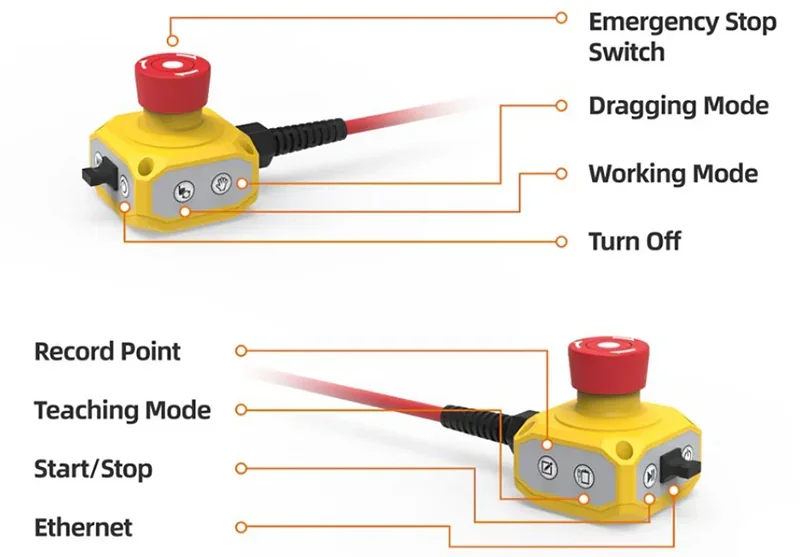
The FR20 supports hand-guiding through Drag teaching mode, activated via the button box. An end-of-arm LED indicates states like Automatic, Manual, Drag, Start/Stop, Enable, and errors to aid operator awareness.
The FR20 supports force/torque-assisted dragging with singularity avoidance and offers collision detection via the FT_Guard command with configurable force and torque thresholds.
The FR series cobots are certified to ISO 10218, ISO 13849, and ISO/TS 15066 for functional safety, and hold CE, KCs, NRTL, RoHS 2.0, and IP54 product certifications, with IP65 available as an option.
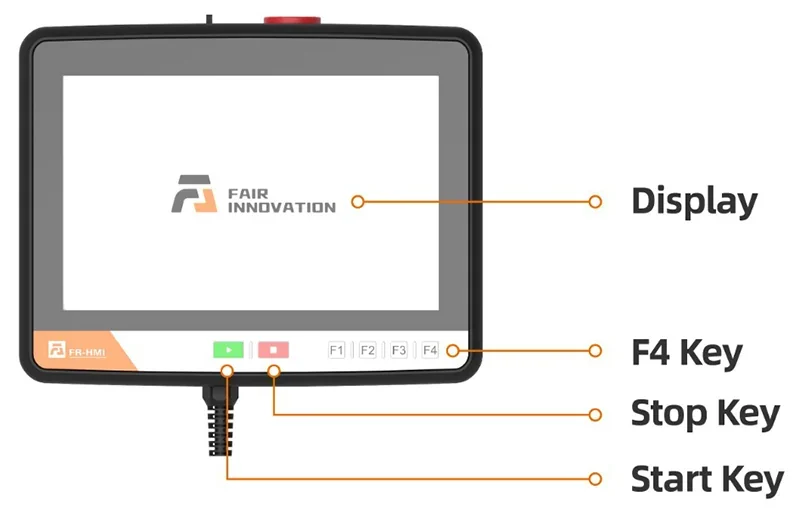
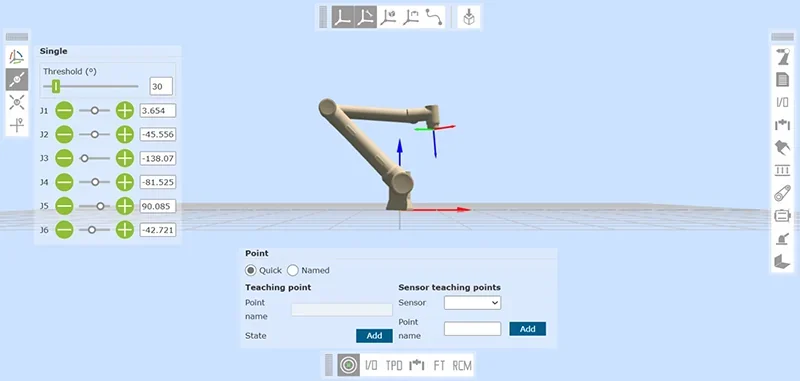
The FR20 is programmed via FAIRINO’s WebAPP, accessible from any PC or tablet at 192.168.58.2. The same interface is mirrored on the teach pendant.
The interface provides both graphical programming and Lua scripting for building tasks in one environment, with multilingual UI support. Programs are created by teaching points (via drag mode or button-box) or by coding directly using commands like PTP() in the editor. Lua is the native scripting language, with all commands and teach files written and run as Lua programs in the WebAPP.
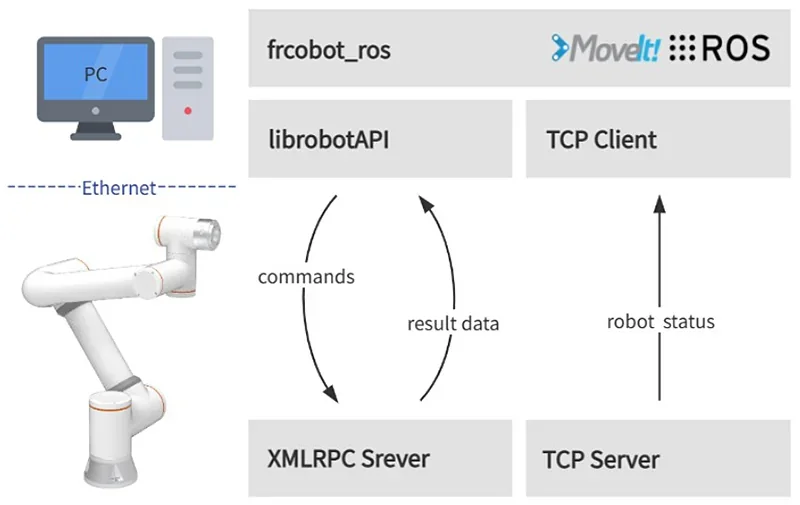
The FR20 uses FAIRINO’s self-developed open platform, offering SDKs for C#, C++, and Python, and supports ROS / ROS 2 for integration with common tools and research stacks. The WebAPP also provides communication primitives (e.g., socket send/receive) for connecting to external systems via Lua.
The Controller Communication Protocol provides API access over TCP/IP for robot state, motion modes, I/O, and peripherals, enabling host applications to control the arm. The WebAPP also converts CAD-generated G-code (G0–G3) into Lua trajectories (MoveJ/MoveL/MoveC/Circle) for offline path planning and verification.
The FR20 offers 50+ connectivity options. The tool flange includes 2 DI, 2 DO, 1 AI, 1 AO, and a 24 V/1.5 A supply for end-effectors. The controller adds 16 DI, 16 DO, 2 AI, 2 AO, and two high-speed pulse inputs for cell-level I/O.

Standard networking includes Ethernet (TCP/IP) with Modbus TCP/RTU. Optional MiniPCIe boards enable CC-Link, PROFINET, EtherNet/IP, and EtherCAT fieldbuses.
The controller has two network interfaces with default IPs 192.168.57.2 and 192.168.58.2 for WebAPP access and device integration. The Safety Box connects via RJ45/PoE and mirrors the WebAPP on the plant network. For host control, the protocol supports UDP configuration for PLC/IPC links, including IP, port, cycle, and reconnect settings.
The FR20 features an aluminum-steel arm with sealed IP54 joints (IP65 optional) and a compact 240 mm base. The arm weighs ~85 kg and can be mounted in any orientation. Noise is <70 dB during typical operation.

The controller has a galvanized IP54-rated chassis, measuring 245 x 180 x 44.5 mm and weighing 2.1–2.5 kg.

The optional teach pendant is an IP54-rated ABS/PP unit, 268 x 210 x 88 mm, weighing 1.6 kg — durable and compact for industrial use.
The FR20 operates at 0–45 °C and up to 90% RH (non-condensing), matching its IP54 rating (IP65 optional). Installation conditions are 0–45 °C, 20–80% RH, below 2000 m altitude, and free from mechanical shock or impact.
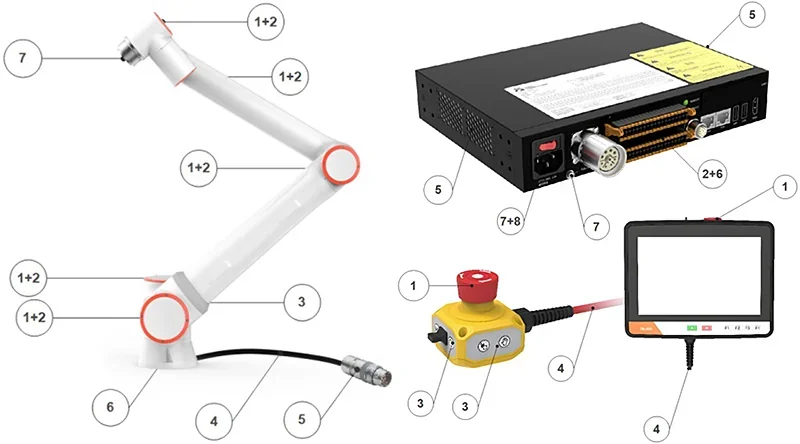
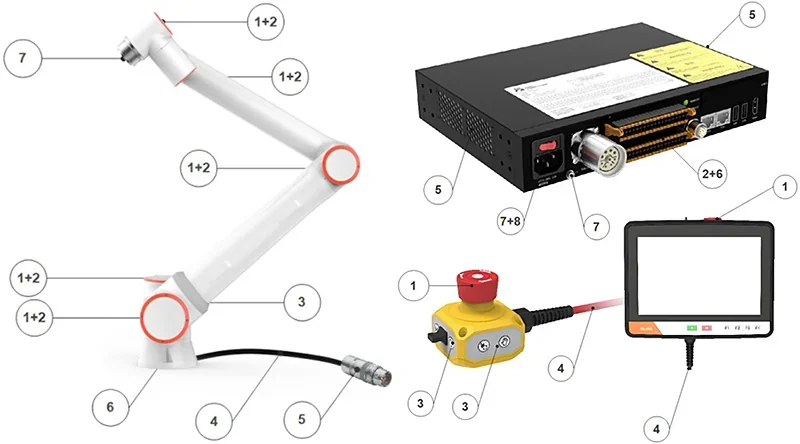
The standard FAIRINO FR20 collaborative robot arm package includes:
The FR20 ships fully assembled with a separate control and button box. After securing the base and connecting the cables and power, it’s ready to run via the WebAPP.
Please Note: Package contents are determined by the manufacturer and may change without notice. To confirm the current items included with this product, please contact a Top3DShop sales representative before placing your order.
|
Accessory |
Variation |
Function |
Price (USD) |
Image |
|
Fairino Teach Pendant |
Rugged tablet-style teach pendant for Fairino cobot operation and programming. Displays the Fairino web interface on a dedicated handheld device, so the operator can control and teach the robot directly at the cell without a laptop or desktop. Designed for industrial environments where a PC is not practical. |
800 |
|
|
|
Fairino Quick Control Buttons |
Physical quick-control button set for Fairino cobots. Supports manual drag-and-drop teaching and fast motion commands without using the web interface. Intended for quick operator interaction during tasks such as welding and other manual teaching workflows. |
415 |
|
|
|
Force Torque Sensor |
Force/torque sensor for contact tasks such as compliant assembly, surface finishing, and force-controlled motion. |
1000 |
|
Default specifications for all electric grippers: 24 V DC (±10%), Modbus RTU (RS485) + Digital I/O, optional TCP/IP / USB 2.0 / CAN2.0A / PROFINET / EtherCAT, operating 0–40 °C, <85% RH, CE/FCC/RoHS.
|
Accessory |
Variation |
Function |
Price (USD) |
Image |
|
DH-Robotics AG Series Adaptive Grippers (2-finger) |
AG-160-95 |
Linkage-driven jaws conform to uneven or variable-shape parts for stable gripping.
|
3215 |
|
|
AG-105-45 |
What’s different from AG-160-95:
|
3365 |
|
|
|
DH-Robotics PGC Series Collaborative Electric Parallel Grippers |
PGC-50-35 |
Two jaws move in parallel for repeatable pick-and-place and machine tending.
|
1715 |
|
|
PGC-140-50 |
What's different from PGC-50-35:
|
2065 |
|
|
|
PGC-300-60 |
What's different from PGC-50-35:
|
2435 |
|
|
|
DH-Robotics RGI/RGIC Series Rotary Electric Grippers |
RGIC-35-12 |
Grips the part and rotates it continuously (endless rotation axis).
|
1315 |
|
|
RGI-100-14 |
What's different from RGIC-35-12:
|
1565 |
|
|
|
RGI-100-22 |
What's different from RGIC-35-12:
|
1515 |
|
|
|
RGI-100-30 |
What's different from RGIC-35-12:
|
1565 |
|
|
|
RGIC-100-35 |
What's different from RGIC-35-12:
|
1965 |
|
|
|
DH-Robotics PGE Series Slim Electric Parallel Grippers |
PGE-2-12 |
Slim parallel gripper for tiny parts.
|
685 |
|
|
PGE-5-26 |
What's different from PGE-2-12:
|
685 |
|
|
|
PGE-8-14 |
What's different from PGE-2-12:
|
685 |
|
|
|
PGE-15-10 |
What's different from PGE-2-12:
|
685 |
|
|
|
PGE-15-26 |
What's different from PGE-2-12:
|
685 |
|
|
|
DH-Robotics PGE Series Electric Parallel Grippers |
PGE-50-40 |
For general pick-and-place tasks.
|
715 |
|
|
PGE-100-26 |
What's different from PGE-50-40:
|
785 |
|
|
|
DH-Robotics PGHL Series Heavy-Load Electric Parallel Gripper |
PGHL |
Heavy-load parallel gripper for high clamping force and large workpieces.
|
1600 |
|
|
DH-Robotics AG3 Adaptive Electric Gripper (Three-Finger) |
AG3 |
Three-finger adaptive gripper with centric (self-centering) grasp for irregular shapes.
|
9950 |
|
|
Accessory |
Variation |
Function |
Price (USD) |
Image |
|
Centric Finger - SoftActuator (AR Series) |
Three Fingers |
Three finger soft, lightweight grippers use rounded, edge-free silicone fingers that conform to each item’s shape for secure, damage-free holding. Their low mass and pneumatic actuation enable fast, high-speed handling across many food products. The fingers are made from FDA-approved silicone rubber. |
770 |
|
|
Centric Finger - SoftActuator (AR Series) |
Four Fingers |
Same as above, with 4 fingers. |
1015 |
|
|
Centric Finger - SoftActuator (AR Series) |
Six Fingers |
Same as above, with 6 fingers. |
1500 |
|
|
Centric Finger - SoftActuator (AR Series) |
Eight Fingers |
Same as above, with 8 fingers. |
2000 |
|
|
Centric Finger - SoftGripper (R Series) |
Three Fingers |
Three finger lightweight, edge-free grippers use soft, pneumatically actuated FDA-approved silicone fingers that conform to each item for secure, damage-free handling. Their low mass enables high-speed cycling across a wide range of food products. |
740 |
|
|
Centric Finger - SoftGripper (R Series) |
Four Fingers |
Same as above, with 4 fingers. |
900 |
|
|
Centric Finger - SoftGripper (R Series) |
Six Fingers |
Same as above, with 6 fingers. |
1230 |
|
|
Controlbox - SoftGripping |
Built-In Pump |
This controller provides simple, precise control of soft, flexible grippers. A front-panel display shows current air pressure, and a rotary knob allows accurate pressure adjustment. The rear panel includes a pressure outlet and control signal input. The signal selects finger position in three modes: Grip, Open, and Relax. It’s available in two versions:
|
1100 |
|
|
Controlbox - SoftGripping |
Compressed Air |
1700 |
|
|
|
Parallel Finger - SoftGripper (S Series) |
Two Fingers |
Two finger lightweight, edge-free grippers use soft, pneumatically actuated FDA-approved silicone fingers that conform to each item for secure, damage-free handling, and come in multiple base models with varied finger layouts and angles to fit your application. |
600 |
|
|
Parallel Finger - SoftGripper (S Series) |
Four Fingers |
Same as above, with 4 fingers. |
900 |
|
|
Parallel Finger - SoftGripper (S Series) |
Six Fingers |
Same as above, with 6 fingers. |
1230 |
|
|
Parallel Finger - SoftGripper (S Series) |
Eight Fingers |
Same as above, with 8 fingers. |
1630 |
|
|
Accessory |
Variation |
Function |
Price (USD) |
Image |
|
Electric Cobot Vacuum Gripper - Schmalz |
This Schmalz electric vacuum gripper is fully compatible with Fairino collaborative robots (including FR5 and FR10), features integrated vacuum generation for pump/compressor-free installation, offers quick-change suction cups in multiple versions for versatile small-part handling, and supports up to a 3 kg payload. |
1540 |
|
|
|
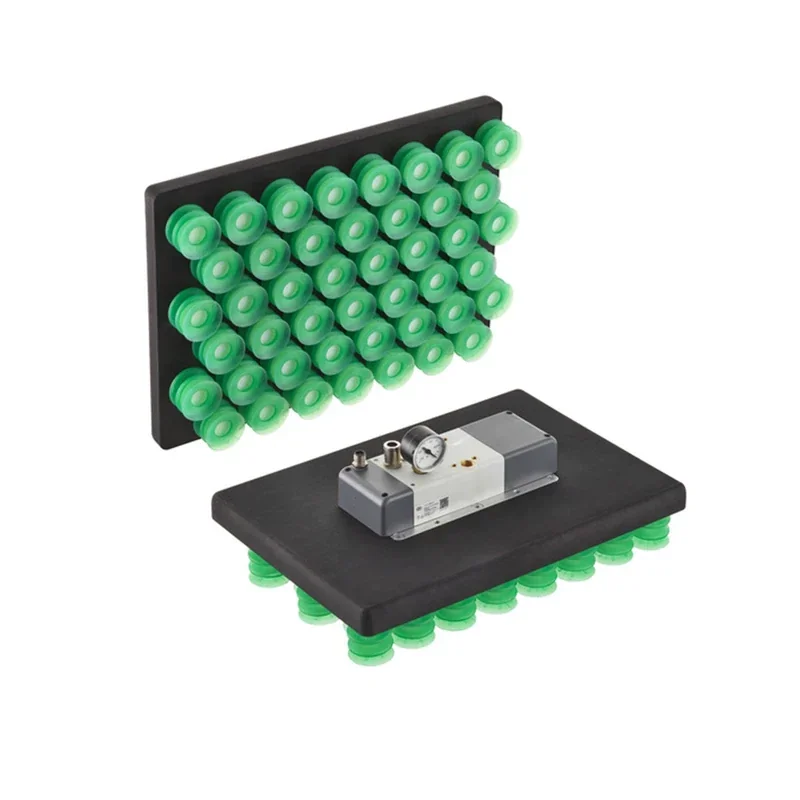
Cobot Vacuum Gripper Set - 230×120 - Schmalz |
Suction Cups |
Developed with Schmalz, this plug-and-play, self-contained vacuum gripper set for palletizing cartons and boxes generates and switches vacuum internally using compressed air (no external pump), includes all mounting hardware and connectors, is compatible with Fairino cobots, and provides a 230 × 120 mm suction surface with up to a 37 kg load capacity. |
3080 |
|
|
Cobot Vacuum Gripper Set - 230×120 - Schmalz |
Foam |
The foam version of the above grippper. |
2750 |
|
|
Cobot Vacuum Gripper Set - 400×280 - Schmalz |
Suction Cups |
Same gripper with the 400×280 mm suction surface. |
4300 |
|
|
Cobot Vacuum Gripper Set - 400×280 - Schmalz |
Foam |
The foam version of the above grippper. |
3850 |
|
|
Electric Vacuum Gripper Adapter - Schmalz |
SLG2 |
Adapters for the Schmalz electric vacuum gripper let you add extra suction cups for better load distribution and stability, and are available as SLG2 (2 cups), SLG3 (3 cups), and SLG4 (4 cups). |
440 |
|
|
Electric Vacuum Gripper Adapter - Schmalz |
SLG3 |
470 |
|
|
|
Electric Vacuum Gripper Adapter - Schmalz |
SLG4 |
530 |
|
|
Accessory |
Variation |
Function |
Price (USD) |
Image |
|
Quick Cobot Tool Changer |
Complete set (Cobot side + Tool side) |
The Quick Tool Changer is compatible with all FAIRINO cobots (FR3, FR5, FR10, FR16, FR20, and FR30) and enables fast, tool-free tool changes with a simple click—no screws or readjustment required. |
315 |
|
|
Quick Cobot Tool Changer |
Cobot side only |
150 |
|
|
|
Quick Cobot Tool Changer |
Tool side only |
165 |
|
|
|
Dual Cobot Tool Adapter |
Compatible with all FAIRINO cobots (FR3, FR5, FR10, FR16, FR20, and FR30), the Dual Tool Adapter lets the robot carry and use two tools simultaneously and is precision CNC-milled from 6061 aluminum, then blasted and anodized for a durable finish. |
370 |
|
|
|
Cobot Stand |
This rigid cobot column fits the full Fairino range (FR3–FR30) with a top plate drilled for each model’s mounting pattern, adding stability—especially for larger units like the FR20—for precision tasks such as palletizing, pick-and-place, and machine tending, with a standard height of 1000 mm. |
1210 |
|
|
|
Cobot Cover |
FR20 |
210 |
|
|
Accessory |
Variation |
Function |
Price (USD) |
Image |
|
2D Vision Kit - Fairino - IFM |
Object recognition |
This complete IFM 2D vision kit integrates directly with Fairino cobots to locate objects, read barcodes, and perform text recognition using guided setup wizards (no complex programming), includes software, manual, camera, mounting bracket, data and power/I/O cables, and is available in multiple camera variants with support to choose the right one. |
2525 |
|
|
2D Vision Kit - Fairino - IFM |
Object recognition + QR/Barcode recognition |
3200 |
|
|
|
3D Vision Kit - Fairino - IFM |
This complete IFM 3D vision kit integrates directly with Fairino cobots to detect objects and measure properties like dimensions and volume via guided setup wizards (no complex programming), and includes software, manual, 3D camera, mounting bracket, data and power/I/O cables, and a power supply, with multiple camera variants available for different use cases. |
2650 |
|
|
|
Fairino - Profinet - Ethernet/IP - Communication Card |
The Fairino communication card expands Fairino cobot connectivity for easy PLC and industrial network integration, supporting PROFINET, EtherNet/IP, and CC-Link to enable reliable, standardized data exchange across a wide range of control platforms and simplify deployment in existing production lines. |
630 |
|
|
|
HMI Kit - Fairino - Delta |
7 inch |
This HMI kit integrates with Fairino cobots via Modbus TCP for easy read/write monitoring and control, includes Delta’s free design software with a sample project for quick setup, and comes with a Wi-Fi adapter for wireless remote operation plus access to Fairino’s web interface for support and parameter adjustments. |
1210 |
|
|
HMI Kit - Fairino - Delta |
10 inch |
1550 |
|
|
Accessory |
Variation |
Function |
Price (USD) |
Image |
|
Cobot Sanding Kit - Mirka |
The Mirka Cobot Sander is a collaborative-robot-ready sanding kit for Fairino cobots, offering adjustable 1,000–10,000 RPM for precise, repeatable finishing, available with 150/125/77/32 mm pads, and supplied complete with sanding head, control box, mounting bracket, connection cables, and a Fairino connection kit. |
8400 |
|
|
|
Cobot Dust Collection Kit - Mirka |
The Mirka dust collection kit integrates with the cobot sanding kit to let Fairino cobots automatically switch the 1200 W vacuum on/off for consistent, clean sanding, and includes the Mirka vacuum cleaner (4500 L/min airflow, 30 L tank), matched hose, and cobot-to-vacuum switching equipment. |
1350 |
|
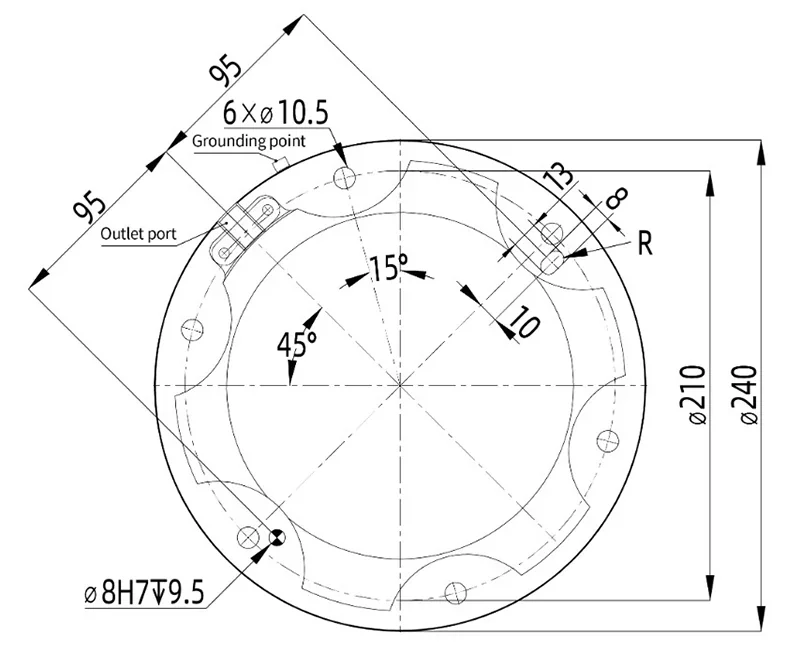
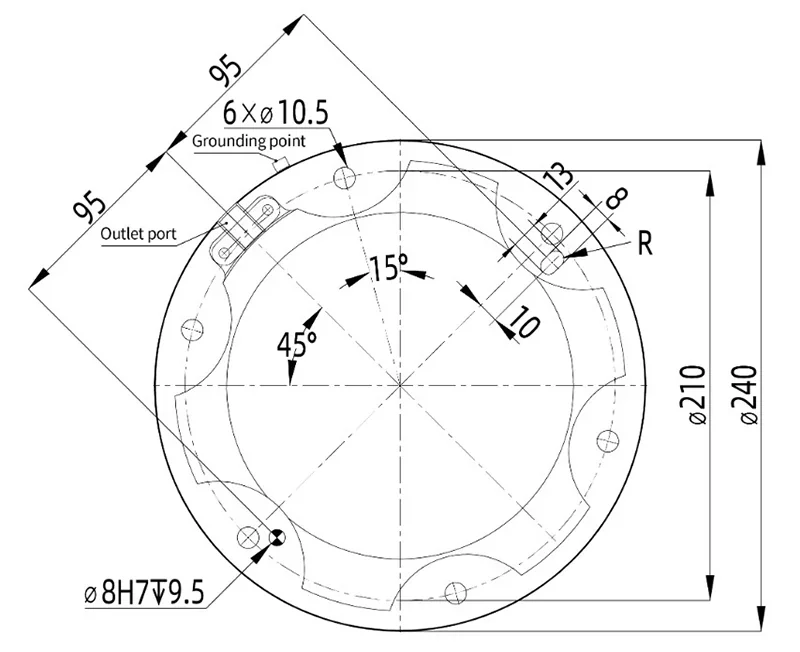
Install the FAIRINO FR20 on a rigid, flat base with at least 5x its weight capacity, high stiffness, and no resonance. Keep it structurally separate from moving equipment. Use six M10 (≥8.8 grade) bolts torqued to ≥45 Nm and two Ø8 mm locating pins. FAIRINO recommends mounting directly to solid ground due to the robot’s mass and inertia. If using a mobile platform or external axis, minimize acceleration.
FR20 model collaborative robot installation size
The FR20 uses either the AC Controller 5 kW or DC Controller 5 kW. Use a controller matched to site power: options include AC 100–240 V, 50–60 Hz, 10 A (2 kW) or AC 100–240 V, 50–60 Hz, 16 A (5 kW), with DC-input variants also listed; the robot must be electrically grounded and the control-box ground resistance ≤ 1 Ω.
| Maximum Input (for customers to configure the front-stage power supply) | Maximum Output (maximum output peak) | |
| DC 2kW | 30–60VDC/30A | 2000W/48VDC/41A |
| DC 5kW | 30–60VDC/40A | 5000W/48VDC/104A |
| AC narrow voltage 2kW | 176–264VAC/10A/Single Machine/50Hz | 2000W/48VDC/41A |
| AC wide voltage 2kW | 100–240VAC/10A/Single Machine/50–60Hz | 2000W/48VDC/41A |
| AC wide voltage 5kW | 100–240VAC/16A/Single Machine/50–60Hz | 5000W/48VDC/104A |
Use 4 mm² copper or 16 mm² aluminum conductors if no mechanical protection is provided. Install an upstream air switch and consider an EMC filter. Always isolate power and post a safety warning before wiring. For I/O power, the controller's internal 24 V supply (1.5 A max) is default; if higher load is needed, use the external 24 V supply (up to 2 A) via the “Power Communication” terminals per the schematic.
Robot wiring schematic diagram

Before first run, check all physical connections and grounding. Test the teach pendant cable, clean the control-box air filter, check terminal tightness, confirm mains connection, and ensure ground resistance is ≤1 Ω. Validate safety circuits by wiring redundant safety I/O and confirming Emergency and Safety Stop functions per your risk assessment. Power on only after all checks are complete and safety signage is removed.
The FAIRINO FR20 requires 8+ maintenance procedures to retain mechanical fastening integrity, electrical safety, and functional stopping performance over monthly, semi-annual, and annual intervals. These include visual/mechanical checks of the arm, functional tests of safety circuits, and controller housekeeping performed with power isolated.
Arm checklist (rear covers, screws, rubber rings, cables / cable links, base mounting bolts, and end-tool mounting bolts)
| Check item | Monthly | Semi-annually | Annually | ||
| 1 | Check joint rear cover * | V | ✓ | ||
| 2 | Check joint rear cover screws | F | ✓ | ||
| 3 | Check joint rubber ring | V | ✓ | ||
| 4 | Check robot cables | V | ✓ | ||
| 5 | Check robot cable links | V | ✓ | ||
| 6 | Check robot base mounting bolts * | F | ✓ | ||
| 7 | Check end tool mounting bolts * | F | ✓ |
Note: F = Functional check, V = Visual inspection, * = Must be checked after severe collision.
Controller / teach pendant / button-box checklist (E-stop, safety I/O, mode switching, pendant cable, control-box air filter, terminal tightness, ground resistance ≤1 Ω, and main power checks)
| Check item | Monthly | Semi-annually | Annually | ||
| 1 | Emergency stop button on test button box (teach pendant) | F | ✓ | ||
| 2 | Safety input and output functions on the test terminal strip | F | ✓ | ||
| 3 | Detection button box start/stop, mode switching function | F | ✓ | ||
| 4 | Test button box (teach pendant) cable | V | ✓ | ||
| 5 | Check and clean the air filter on the control box | V | ✓ | ||
| 6 | Check whether the terminals of the control box are firm | F | ✓ | ||
| 7 | Ground resistance of detection control box ≤1Ω | F | ✓ | ||
| 8 | Check the main power supply of the control box | F | ✓ |
Note: F = Functional check, V = Visual inspection.
Operational maintenance (planned stops)
Power down, then inspect the robot–controller cable, base and tool-flange bolts, joint backs, rear covers, and rubber rings. Clean the arm with water, isopropyl alcohol, 10% ethanol, or 10% naphtha — avoid bleach. Minor grease at joints is normal and doesn't affect lifespan.
Preventive maintenance (monthly / semi-annual)
Test the Emergency Stop to ensure the robot halts and joint power cuts. Verify safety I/O, start/stop, and mode switching on the button box. Inspect the pendant cable. Clean the control-box air filter, check and tighten terminals, confirm main power, and ensure ground resistance is ≤1 Ω. Use a torque wrench to check base and tool-flange fasteners per install specs. Clean the controller interior with an ESD vacuum — do not use compressed air.
Comprehensive maintenance (annually)
Repeat full arm and controller inspections. Re-test Emergency Stop from both the pendant and button box. Recheck base and tool-flange torque, and verify controller power and grounding as before.
Skills and tools
With power off, perform operational cleaning and visual checks using hand tools and approved cleaners. Preventive tasks require a torque wrench, ESD vacuum, controller access for terminal and air filter checks, and ground resistance testing (≤1 Ω). Functional tests include E-stop activation and restart per procedure. Always isolate control-box mains before any work; never use compressed air inside the controller. Downtime results from required isolation, inspection, torque checks, and restart steps.
The FAIRINO FR20 includes a 12-month warranty for material and workmanship defects, excluding misuse or unauthorized changes. FAIRINO offers lifetime maintenance support and 24/7 assistance, with remote triage within 12 hours and on-site repair within 36 hours when needed. Support is available at +86 400-811-0929 or sales@frtech.fr. Customers can access manuals, FAQs, a documentation portal, and tutorials — including the FR controller communication manual and quick-start guides for components like the button box and end-LED.
Full warranty terms: https://fairino.com/SupportCenter

The FAIRINO FR20 is priced at $15,499.00, reflecting its heavy-duty payload, collaborative design, broad accessory support, and OEM scalability. Typical add-on premiums over the base price include: Teach Pendant +3–6%, Safety Box +2–4%, both +5–9%; electric grippers +3–5%; vision kits +15–25%; 6-axis force/torque sensors +4–7%; palletizing hardware +20–35%; explosion-proof cabinet +18–30%. Contact Top 3D Shop for custom quotes. Final pricing depends on application kits, fieldbus boards, end-effectors, mounting, commissioning, training, warranty, parts, logistics, and taxes.
Update your browser to view this website correctly. Update my browser now