
The Unitree G1 is a bipedal humanoid robot designed for R&D, education, medical, and commercial use. As of 2025, the Unitree G1 is the best-selling humanoid robot in the market with more than 1000 units shipped. At 1.32m tall and 35kg, it offers 23–43 degrees of freedom and joint torques up to 120 N·m.
The Unitree G1 uses 3D LiDAR, depth cameras, and an 8-core CPU for sensing and movement. The EDU version adds an NVIDIA Jetson Orin NX with 100 TOPS AI processing, enabling programming, reinforcement learning, and autonomous operation. The G1 has achieved world records (1.4m long jump, side flip, kip-up), 90% success rate in medical tasks, and competed in robot boxing.
Key specs include speeds over 2m/s, up to 43-DOF kinematics, proprietary actuators, dual computing, rich sensor arrays, and support for C++/Python/ROS2. The platform includes full documentation, maintenance support, warranty, and accessories.
| Features | Unitree G1 Basic | Unitree G1 Edu Standard | Unitree G1 Edu Plus | Unitree G1 Edu Ultimate A | Unitree G1 Edu Ultimate B | Unitree G1 Edu Ultimate C | Unitree G1 Edu Ultimate D |
|---|---|---|---|---|---|---|---|
| Degrees of Freedom | 23 | 23 | 29 | 43 | 43 | 41 | 41 |
| DOF per leg | 6 | 6 | 6 | 6 | 6 | 6 | 6 |
| DOF per arm | 5 | 5 | 7 | 7 | 7 | 7 | 7 |
| DOF waist | 1 | 1 | 3 | 3 | 3 | 3 | 3 |
| Max knee torque 120 N·m | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | |
| Max arm load 3 kg | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | |
| Robotic Hands | 3-finger hands | 3-finger hands (with tactile sensors) | 5-finger hands (with tactile sensors) | 5-finger hands (with tactile sensors) | |||
| 8-core high-performance CPU | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| 100 TOPS AI Secondary development | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | |
| MAP Price (USD) | $21,500 | $42,435 | $52,367 | $64,292 | $66,277 | $66,277 | $73,900 |
The Unitree G1 offers record agility with a 1.4 m standing long jump, the first humanoid side flip, 3 kg payload per arm, and dexterity for complex maneuvers with precision from athletic moves to remote medical procedures.
Record-Breaking Achievements:
Dynamic Capabilities:
Key Performance Specifications:

Research and Development Examples:
In 2024, the Carnegie Mellon University and NVIDIA introduced ASAP, a framework that enables the Unitree G1 to replicate athletic movements by aligning simulation with real-world physics. With ASAP, the G1 successfully performs complex moves like Cristiano Ronaldo’s 180° jump celebration, LeBron James’s single-leg “Silencer,” and Kobe Bryant’s fadeaway jump shot.
Github: https://github.com/LeCAR-Lab/ASAP, https://agile.human2humanoid.com/
In 2025, UC San Diego researchers developed a bimanual teleoperation system for the Unitree G1 robot to perform remote-controlled medical procedures. Tested across seven tasks — ranging from physical exams to precision needlework — the system showed strong results: 90% accuracy in bag-valve mask ventilation, 70% success in ultrasound-guided injections (outperforming some untrained students), and 86.3% success in suturing.
GitHub: https://surgie-humanoid.github.io/
In April 2025, researchers from Shanghai AI Lab and CUHK introduced HOMIE, a $500 teleoperation system for humanoid robots combining foot-pedal-controlled lower-body movement with an exoskeleton for precise upper-body control. This setup lets a single operator perform complex tasks like squatting and walking while manipulating objects, reaching 80% success in pick-and-place tasks.
In 2025, Carnegie Mellon researchers introduced SoFTA, a two-agent system to keep humanoid robot hands stable while walking. A slow agent controls leg movement at 50 Hz, while a fast agent stabilizes the upper body at 100 Hz. This reduced hand acceleration by 50–80%, allowing the Unitree G1 to carry water without spilling and record smooth video while moving.
Github: https://lecar-lab.github.io/SoFTA/
Dexterous Manipulation:
The Unitree G1 supports multiple locomotion modes including standing, walking, and running with seamless transitions between gaits, achieves bipedal walking speeds up to 2m/s (7.2 km/h), can climb stairs and navigate slopes with variable terrain adaptability including stepping stones with 80% success rate, and features advanced recovery behaviors including dynamic balance recovery when pushed, kip-up capability from supine positions, and emergency damping modes for safety.
Out-of-the-Box Navigation (No Special Training):
The Unitree G1 can handle stairs, slopes up to 25°, uneven terrain, and basic obstacle avoidance using 3D LiDAR and depth cameras.
Limitations on Difficult Terrain:
Example: In July 2025, the G1 fell on an indoor basketball court.
Navigation Enhanced with BeamDojo Training:
In 2025, researchers introduced BeamDojo, a two-stage reinforcement learning system that dramatically improves performance on challenging terrains:
BeamDojo uses a two-stage training strategy and a dual-critic reward system to achieve agile, precise locomotion on the Unitree G1—even under external disturbances—with strong sim-to-real transfer success.
The Unitree G1 maintains balance under external forces and can recover from falls by standing up from supine, prone, or seated positions—even while carrying up to 12 kg.
In 2025, researchers from Shanghai Jiao Tong University, The University of Hong Kong, and Zhejiang University introduced HOST, a reinforcement learning system that trains the G1 to stand up without pre-programmed motions. It was tested indoors and outdoors, reliably recovering from falls — even when disturbed or carrying weight.
Github: https://taohuang13.github.io/humanoid-standingup.github.io/
Core Operational States:
Postural States:
Locomotion States:

Dimensions:
Weight:

Total Degrees of Freedom Breakdown:
G1 Basic (23 Degrees of Freedom):
G1 EDU (23 – 43 Degrees of Freedom):
Joint Movement Range Specifications:
Waist Mobility:
Lower Body Joint Movement Ranges:
Upper Body Joint Movement Ranges:

The Unitree G1 uses proprietary low-inertia Permanent Magnet Synchronous Motor (PMSM) joint motors with maximum torque up to 120 N·m (EDU) or 90 N·m (Basic), featuring hollow shafts for reduced weight and internal wiring. Motors include low-latency response, compact planetary gearboxes, backdrivability, and thermal monitoring.
Each joint uses industrial-grade crossed roller bearings and dual encoders feeding a 500 Hz control loop with force-position control, torque limiting, and 2 ms DDS communication to simulate real-world physics accurately.. Advanced features include impedance tuning, collision detection, IMU-based balance, sub-degree accuracy, and thermal management with effective heat dissipation through local air cooling and automatic power reduction under high temperatures.

All EDU versions of the Unitree G1 series include dual processors for advanced AI: an 8-core ARM CPU for motion control and an NVIDIA Jetson Orin NX delivering 100 TOPS AI performance via 1024 CUDA and 32 Tensor cores.
Details:
Model breakdown:
AI/Graphics: Supports OpenGL 4.6, OpenCL 3.0, DirectX 12.1; CUDA, TensorRT, PyTorch, TensorFlow; Tensor cores accelerate ML inference.
The Unitree G1 includes advanced sensors: a LIVOX 3D LiDAR, Intel RealSense D435i depth camera, 4-microphone array, and an IMU for perception and motion tracking.
Example: The video below shows a Unitree G1 using an Intel RealSense D435i and Moondream 2 vision-language model for natural-language object detection, depth-based position estimation, and experimental arm planning.
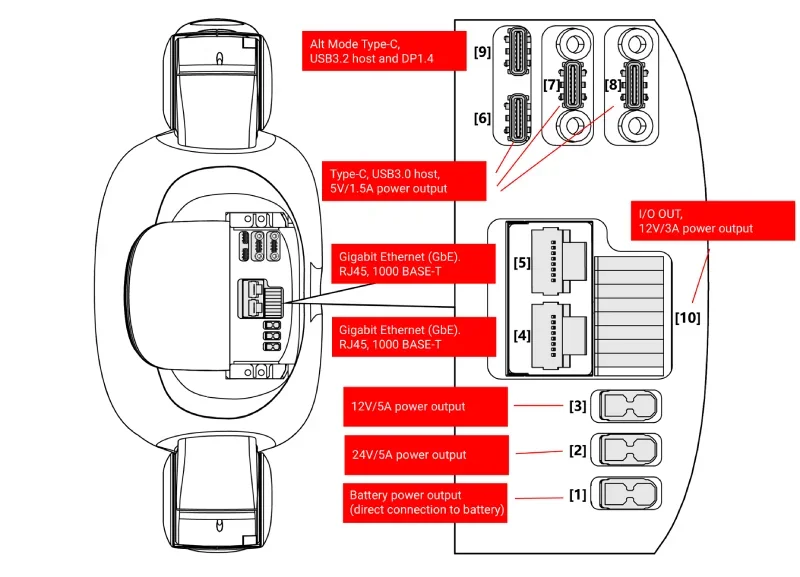
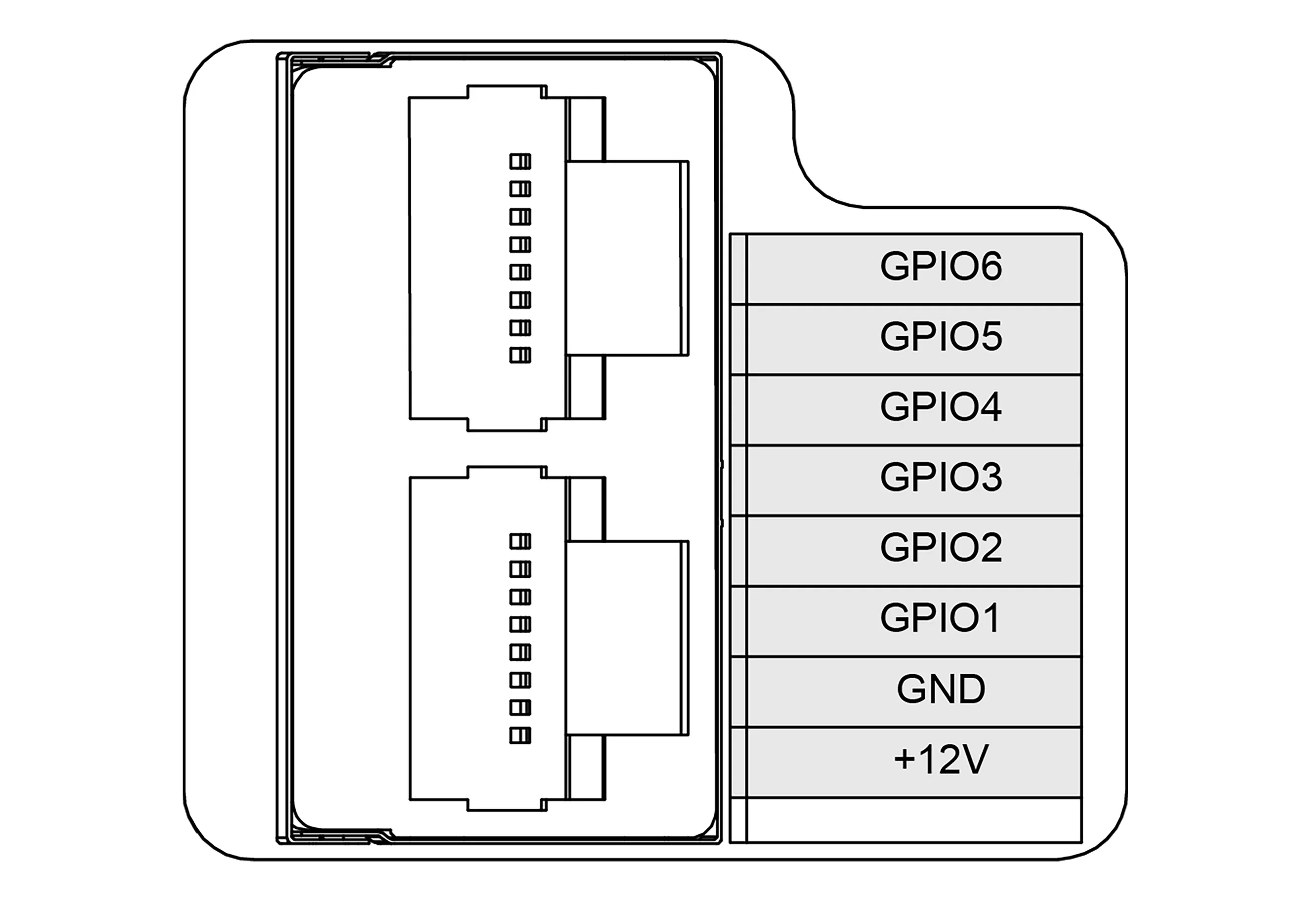
The Unitree G1 includes dual Gigabit Ethernet, Wi‑Fi 6, Bluetooth 5.2, USB 3.0/3.2 Type-C ports, GPIO with UART/I2C/SPI support, and optional CAN via GPIO configuration. All interfaces are accessible from the back of the robot’s neck.
The Unitree G1 includes a handheld remote with joysticks, buttons, status LEDs, and the robot itself features head-mounted LED indicators and audio feedback through built-in speakers.
Remote Control – Physical Controls
Remote Control – Indicators

Robot Head – Indicators
The Unitree G1 uses a 9,000 mAh lithium-ion battery with a 13S configuration, supporting around 2 hours of continuous operation. It features a quick-release, side-mounted design for easy, tool-free swapping.
Key Technical Specifications:

Battery Runtime: Approx. 2 hours, depending on:
Additional Features:
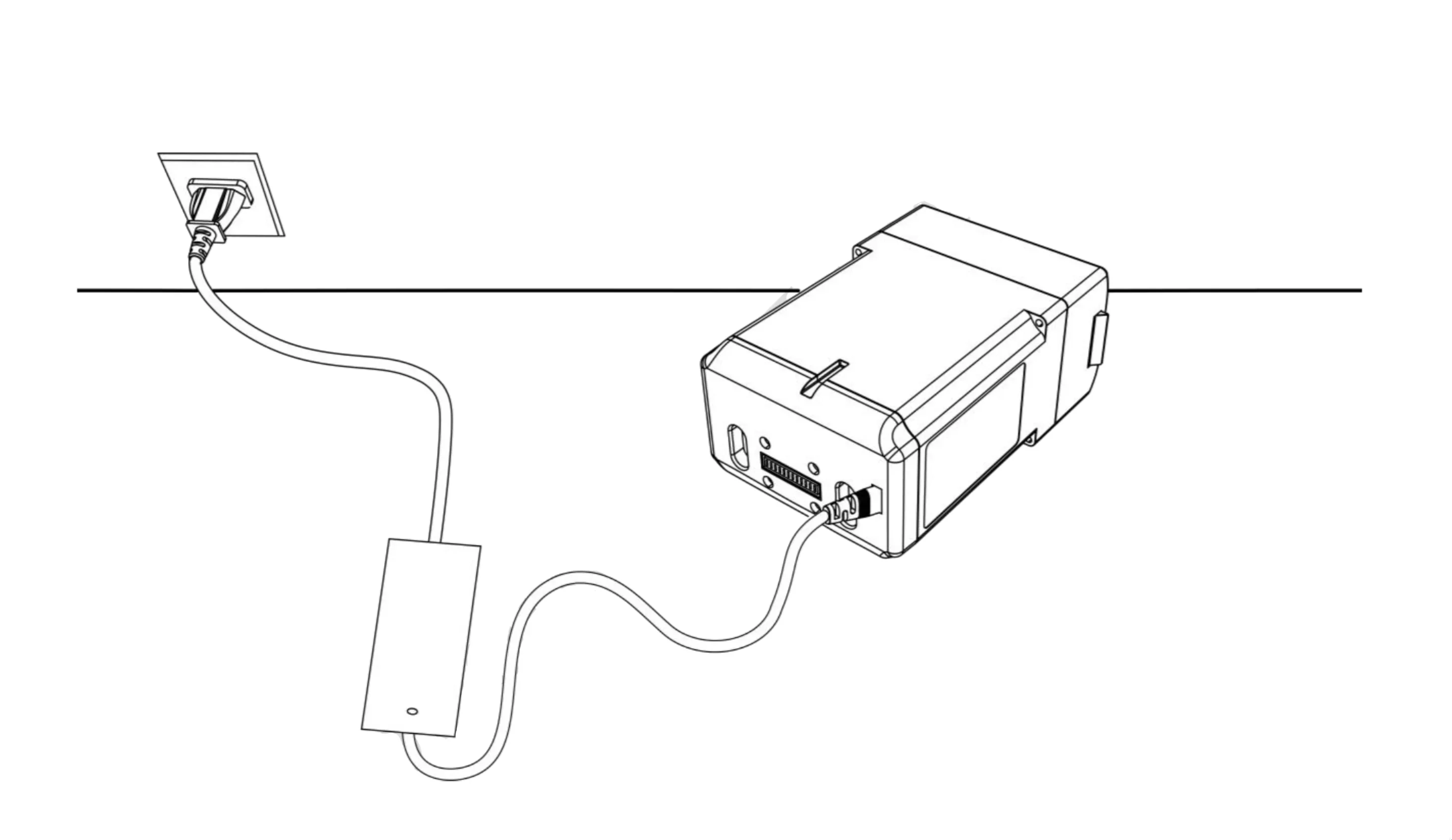
The Unitree G1 operates on 54 V DC, powered by a charger with a 100–240 V AC input.
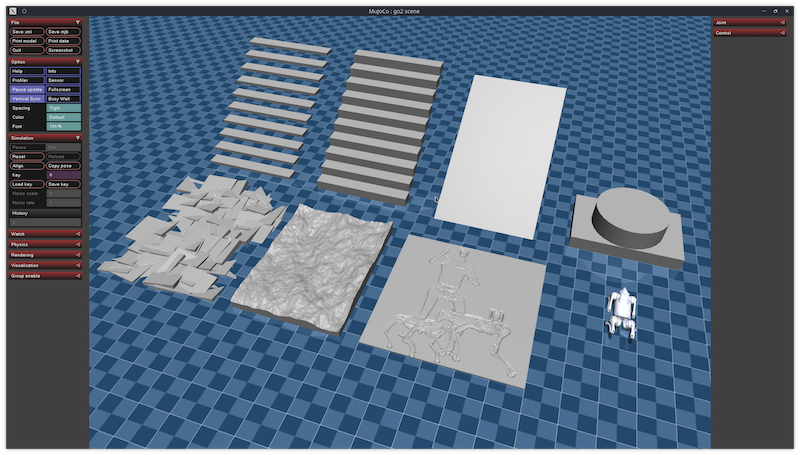
The Unitree G1 supports cutting-edge robotics development with SDK2 (C++/Python, 2ms control), ROS2, simulation tools (MuJoCo, Isaac Gym, Gazebo), AI frameworks (PyTorch, TensorFlow), dataset collection tools, and deployment on Jetson Orin NX with Ubuntu and cloud connectivity.
Full Documentation: https://github.com/unitreerobotics, https://support.unitree.com/home/en/G1_developer
Example: The video below shows a Unitree G1 being configured with Unitree SDK2 and then running low-level ankle-swing and high-level locomotion demos — covering safe startup (damp → balanced stand → continuous gait), a lightweight Python wrapper, and hands-on dev practices.
Example: The next video below shows a Unitree G1 using KISS-ICP SLAM for LiDAR mapping, real-time point cloud and occupancy grid visualization, route planning, and teleop control.
Hardware Platform:
Training and Data Collection:
Example: The video shows a Unitree G1 teleoperated to collect labeled arm and hand movement data, train a lightweight Cartesian-like control model, and test it in simulation and on hardware.
Simulators:
| Isaac Gym | Mujoco | Physical |
|---|---|---|
 |
 |
 |
Features:
Use Cases:
In August 2025, Caltech, UT Austin, and Cornell introduced SHIELD, a safety framework for human robot collaboration. SHIELD learns the gap between a simplified model and real behavior, then uses this to predict disturbances and apply a probabilistic safety filter over high-level commands — without modifying the original controller. Tested on a Unitree G1, SHIELD improved velocity tracking and allowed the robot to maintain a safe distance while navigating around static obstacles and people in unstructured outdoor environments using only onboard sensors.
Learn more: https://arxiv.org/abs/2505.11494
Workflow: Git, Docker, OTA updates, real-time telemetry
Deployment:
Example: The video below shows a Unitree G1 using a PPO-trained reinforcement learning arm-control policy from simulation to real deployment for directional hand positioning.
The Unitree G1 includes built-in safety features such as emergency stop controls, hardware torque limiting, joint limit protection, collision detection, battery management safeguards, thermal shutdown, and communication loss failsafes.

Core Components:
Docs & Cables:
Protection:
Note: G1 EDU includes a protective gantry; G1 Basic does not.

The Unitree G1 supports upgrades in six areas: core enhancements (3-DOF waist, 2-DOF wrists), dexterous hands (3- and 5-finger options), sensors (LIVOX LiDAR, Intel RealSense), development gear (gantry frames), power accessories (batteries, chargers), and replacement parts, priced from $120 to $10,500.
Core System Upgrades:| Upgrade Name | Function | Price (USD) | Image |
|---|---|---|---|
| G1 3 DOF Waist |
Expands waist articulation from 1 to 3 degrees of freedom (Z±155°, X±45°, Y±30°), enabling advanced torso manipulation
|
$5,850 |  |
| G1 2 DOF Wrist | Adds 2 additional wrist degrees of freedom for enhanced flexibility. Order two modules for both hands. | $2,925 | 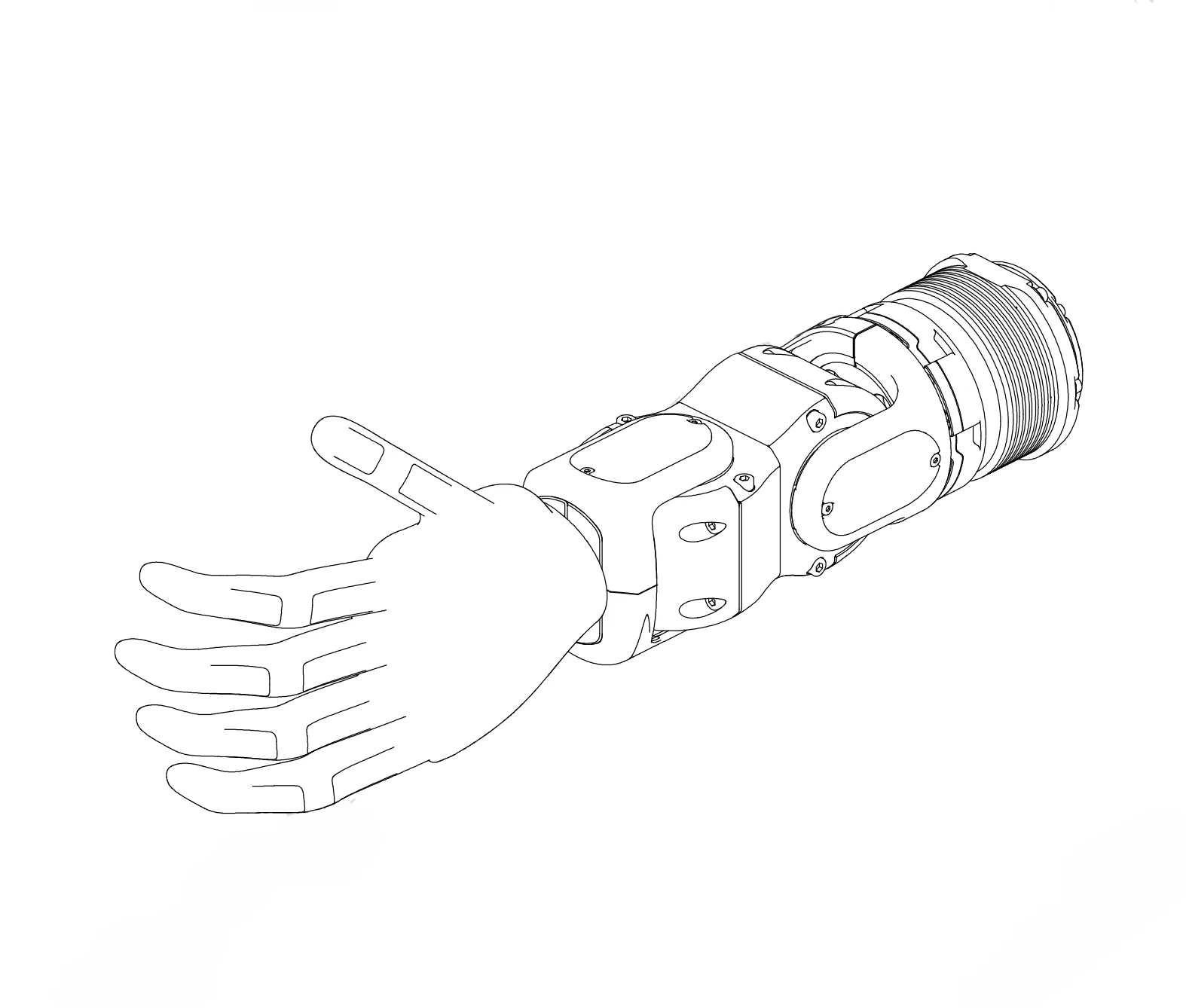 |
| Upgrade Name | Function | Price (USD) | Image |
|---|---|---|---|
| G1 Dex3-1 Force-controlled 3-finger dexterous hand (tactile version) |
The Dex3-1 three-fingered dexterous hand features 7 degrees of freedom — 6 direct-drive and 1 gear-driven micro brushless joints — with 33 integrated tactile sensors for precision manipulation. Key Specs:
Feedback & Control: |
$7,800 |  |
| G1 Dex3-1 Force Control Three Finger Dexterity Hand | 7 DOF hand with 3-finger force control without tactile sensors | $6,500 | 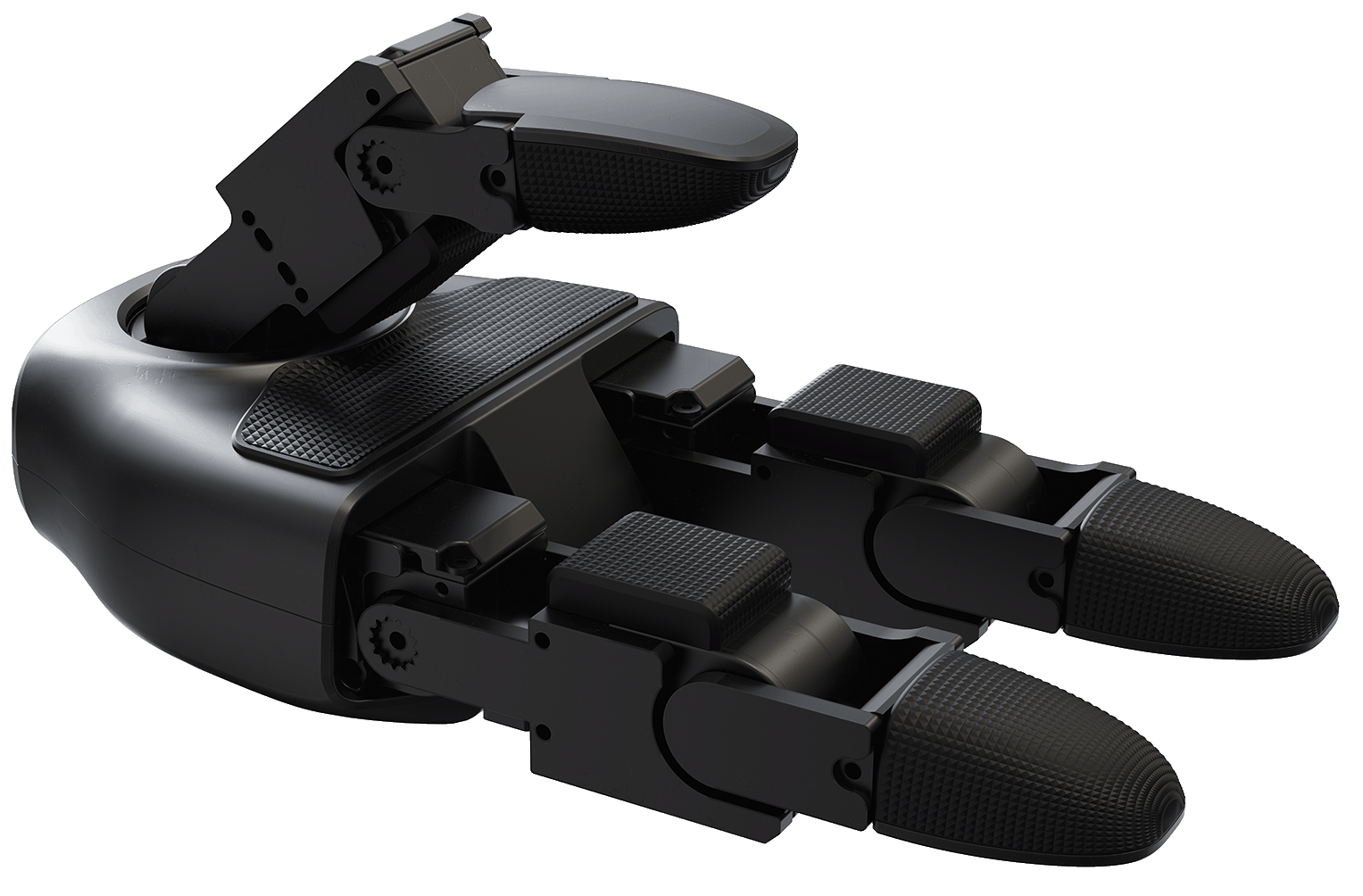 |
| G1 Third-party dexterity (one-handed) |
The Inspire RH56 series offers high-precision five-finger dexterity similar to a human hand with 6 DOF and 12 joints per hand. Both DFX and BFX models weigh 540g, use RS485 control, and run at DC24V±10% with 0.2A quiescent and 2A peak current. Repeatability is ±0.20mm with 0.5N force resolution.
|
$10,500 |  |
| Upgrade Name | Function | Price (USD) | Image |
|---|---|---|---|
| G1 MID360 LiDAR | LIVOX-MID360 omnidirectional 3D LiDAR with 360° horizontal coverage and customized mounting | $3,800 |  |
| G1 Depth Camera | Intel RealSense D435i depth camera with customized mounting bracket and cables | $1,200 |  |
| Upgrade Name | Function | Price (USD) | Image |
|---|---|---|---|
| G1 Gantry | Supports safe testing and debugging for the 35kg G1 robot. Adjustable positioning. Standard with G1 EDU models; sold separately for other models. | $1,850 |  |
| Upgrade Name | Function | Price (USD) | Image |
|---|---|---|---|
| G1 Battery | With Unitree BMS, it offers quick-release design and ~2 hours runtime. BMS includes overcharge, discharge, short-circuit protection, and self-discharge for storage. | $750 |  |
| G1 Battery Charger | AC input: 100–240V, 50/60Hz. 350VA max. Includes safety features and status indicators. Designed for G1’s 13-string lithium battery. | $120 |  |
| G1 Two-handed Remote Control | Wireless controller with digital transmission, Bluetooth connectivity, and 100m+ range.
Features dual joysticks, standard buttons, emergency stop (L1+A). Battery life: 4.5-hours. |
$370 | 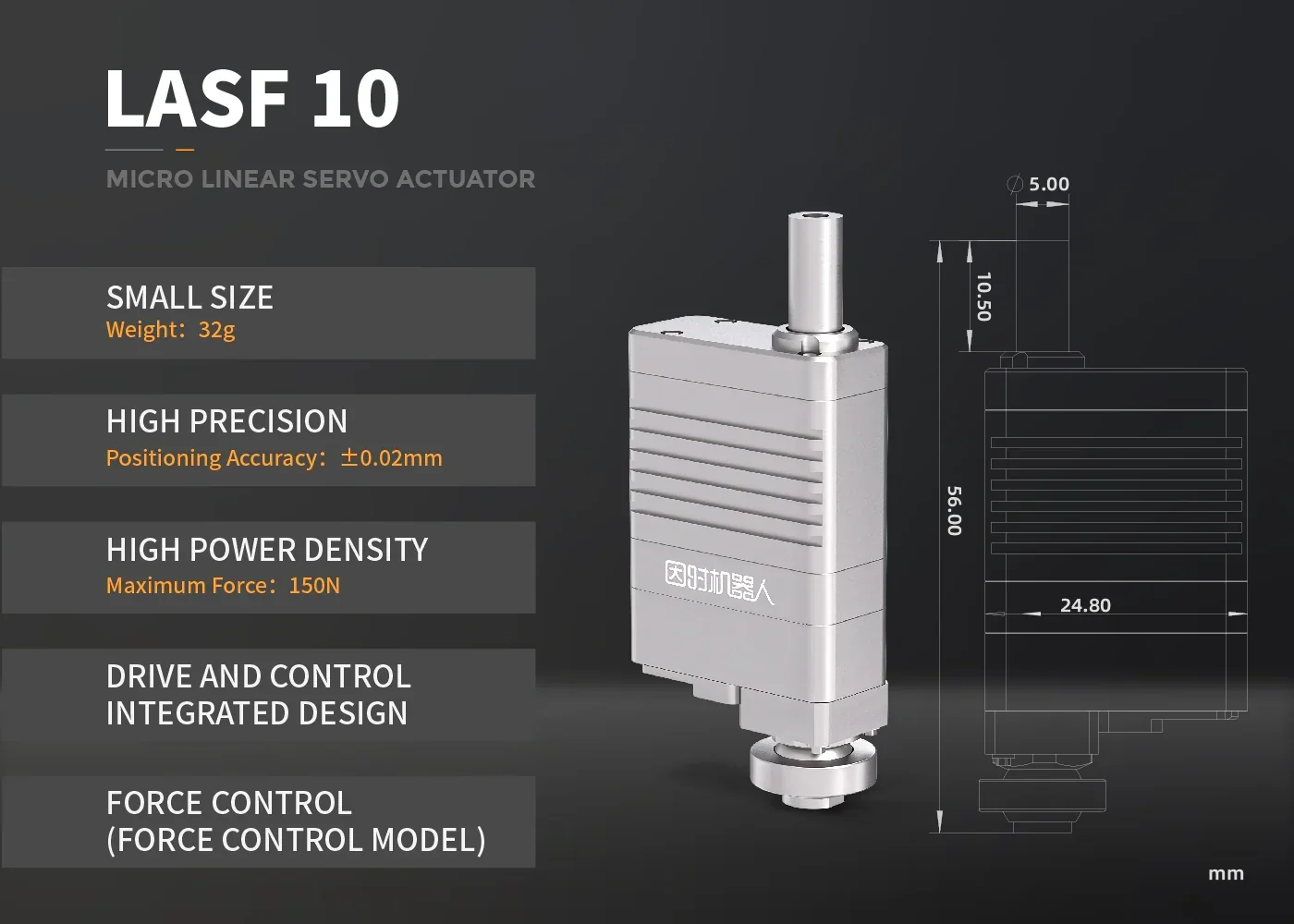 |
| Upgrade Name | Function | Price (USD) | Image |
|---|---|---|---|
| G1 Third-party thumbs motor LASF10-024D | Inspire LASF10-024D thumb motor. Provides 150N thrust over 10mm stroke. ±0.02mm repeatability and integrated force feedback. For thumb control in dexterous hands. Replacement spare part. | $419 |  |
| G1 Third-party four-finger motor LAF10-024D | Inspire LAF10-024D finger motor. Delivers 70N thrust over 10mm stroke. ±0.02mm precision with force feedback. For four-finger dexterous hands. Replacement spare part. | $399 |  |
The Unitree G1 requires regular maintenance: check batteries before use with official chargers, operate in clean, dry conditions between 0 °C–40 °C, perform joint calibration and firmware updates, and use only authentic Unitree parts for repairs.
Battery Maintenance:
Operating Conditions:
System Maintenance:
Warranty Duration:
Warranty Coverage:
Major Warranty Exclusions:
Warranty Claim Requirements:
Terms: https://www.unitree.com/terms
Unitree G1 support includes mobile diagnostics, learning resources, development tools, warranty services, and OTA updates.
Technical Support:
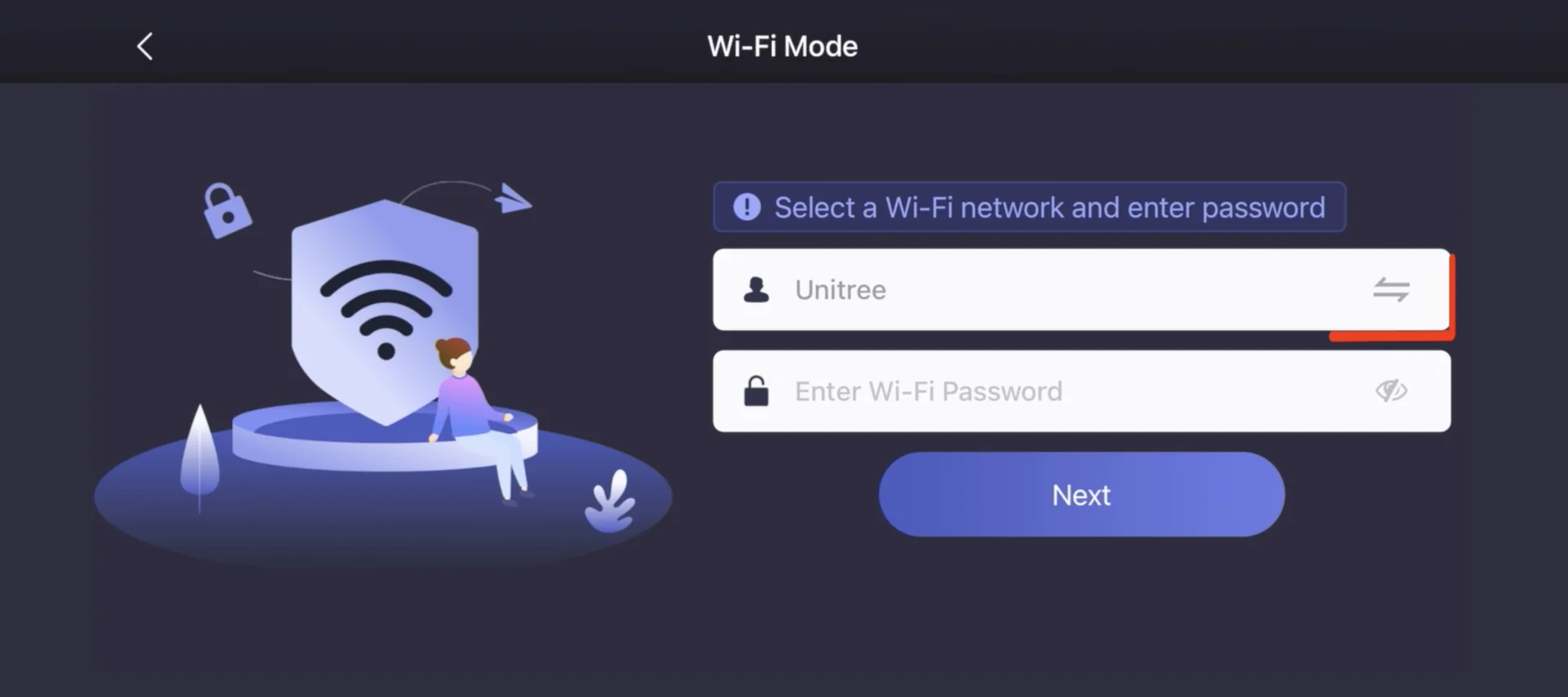
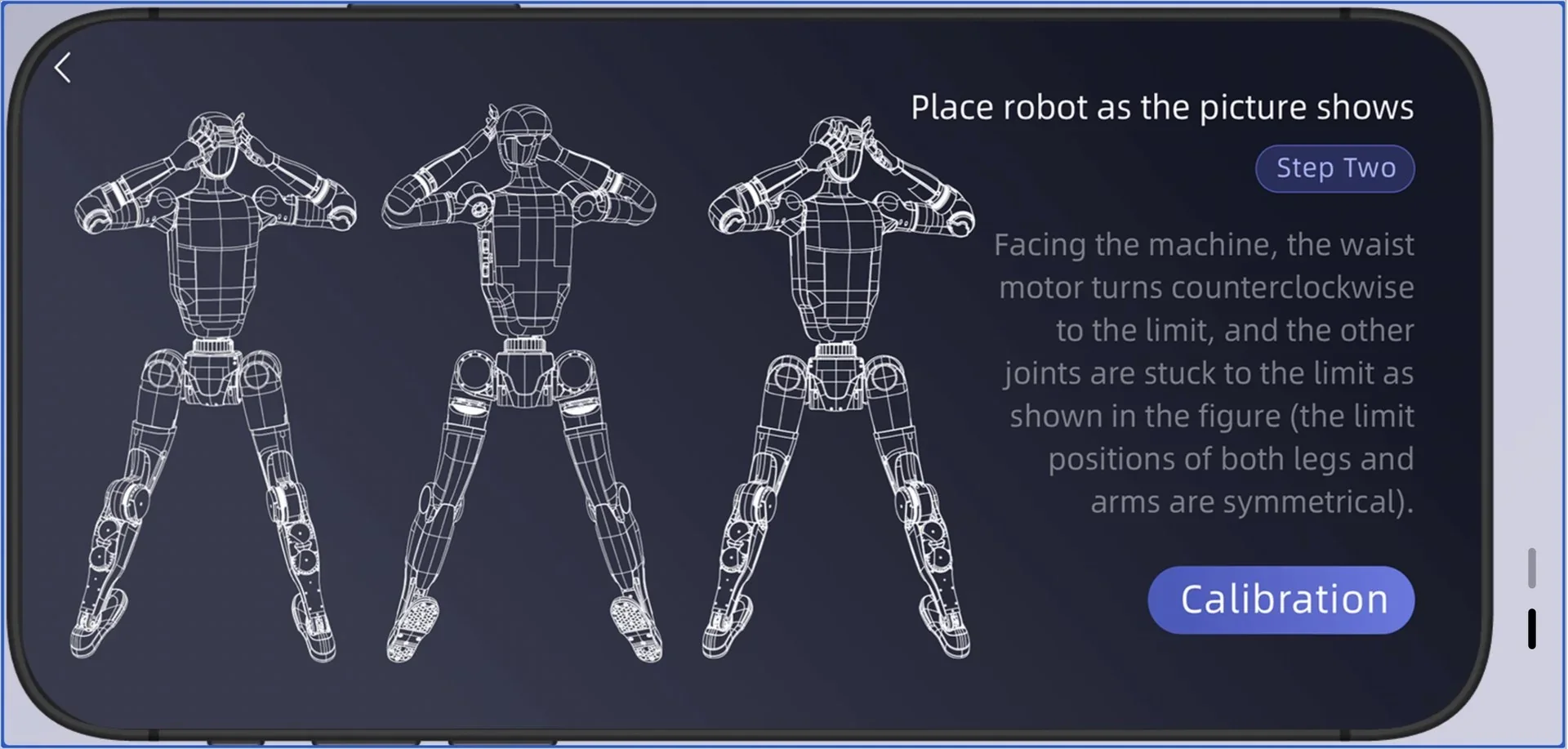
Mobile App (Unitree Explore):

The Unitree G1 robot’s MAP pricing varies by configuration:
Educational/Development Unitree Robots (w/ AI-Powered Computing):
Update your browser to view this website correctly. Update my browser now






