

The Unitree H1 is a 180 cm, 47 kg full-size universal humanoid robot with 19 degrees of freedom, dual arms, and bipedal locomotion powered by M107 motors (360 N·m peak torque). It uses MID-360 LiDAR, an Intel RealSense depth camera, and a dual-computer system separating motion control from user development, supporting SDK programming in C++, Python, and ROS2.
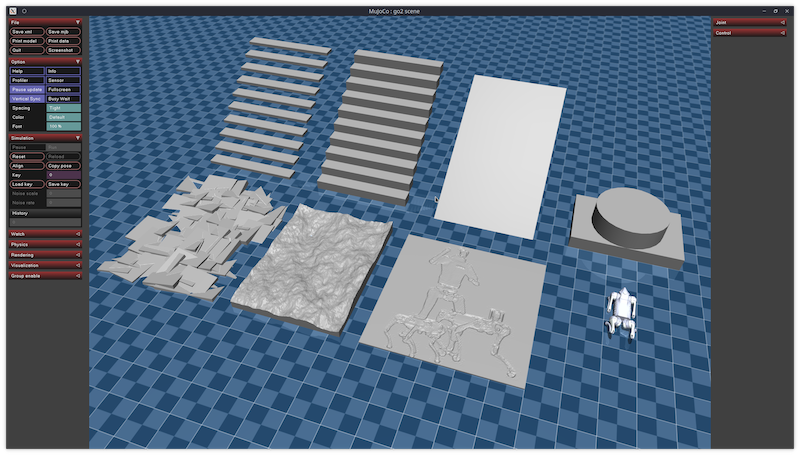
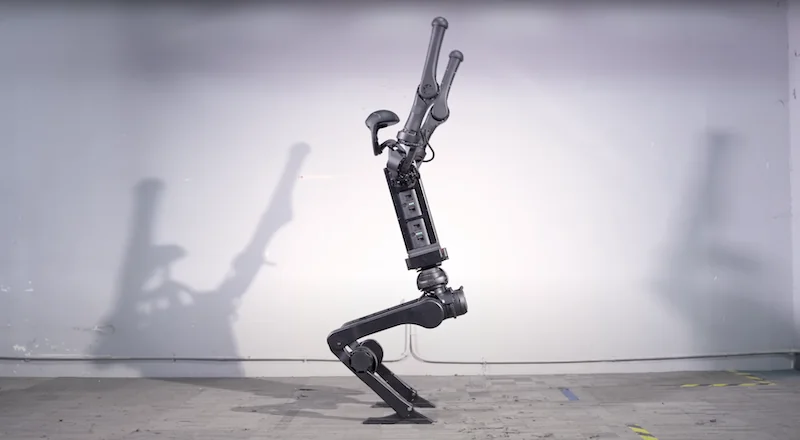
It holds the Guinness record for fastest full-sized humanoid (3.3 m/s) and is the first electric humanoid to land a standing backflip. The H1 offers a full development ecosystem—simulation (MuJoCo, Isaac Lab), teleoperation (XR, Azure Kinect), reinforcement learning, and Sim2Real workflows—backed by documentation and open-source integration. The Unitree H1 humanoid robots are used at Geely, Stanford University, and the University of Texas Health Science Center at Houston.
The Unitree H1 V3.0 Evolution holds the Guinness record for fastest full-sized humanoid, reaching 3.3 m/s (7.38 mph) in March 2024—32% faster than the previous record. At this pace, it could complete a marathon in 3.5 hours. It’s also the first electric humanoid to perform a standing backflip, powered by M107 electric motors with 360 N·m ultimate torque.
Key specs:
Commercial Examples:
In 2023, Zhejiang Geely used the H1 for automotive assembly tests. The H1 by UnitreeRobotics autonomously grasped wheel cover parts, adjusted posture in real time, and installed them while navigating a moving conveyor.
In 2025, sixteen Unitree H1s performed a fully AI-driven dance at the CCTV Spring Festival Gala for over a billion viewers. The Unitree H1 was chosen for its superior power performance capabilities and advanced powertrain technologies.
Research Examples:
In Dec 2024, UC San Diego, MIT, and NVIDIA researchers published Mobile-TeleVision: Predictive Motion Priors for Humanoid Whole-Body Control, led by Chenhao Lu. The method decouples upper-body manipulation from lower-body locomotion, using Predictive Motion Priors (via Conditional Variational Autoencoders) to guide a reinforcement learning lower-body controller. This enables precise manipulation and stable walking, outperforming existing RL methods by ~40% in manipulation accuracy while maintaining locomotion stability. Tested on Unitree H1 robots, the system handled complex tasks like carrying objects, using elevators, and teleoperating with stable walking under disturbances. GitHub: https://mobile-tv.github.io/
In 2024, researchers from Shanghai Qi Zhi Institute, ShanghaiTech University, and Tsinghua University published Humanoid Parkour Learning at CoRL 2024, led by Ziwen Zhuang. They developed an end-to-end vision-based whole-body-control policy for humanoid parkour without motion priors. A single policy enabled 0.42 m platform jumps, 0.8 m gap leaps, 1.8 m/s outdoor running, and autonomous navigation over varied terrains. Using fractal noise terrain instead of complex reward engineering, they trained locomotion skills via a two-stage pipeline: planar walking with turns, then parkour over 10 terrain types with auto-curriculum and virtual obstacles. The method achieved zero-shot sim-to-real transfer on the Unitree H1 using only onboard proprioception and depth cameras. Arm overrides during parkour did not affect stability, allowing potential integration with manipulation tasks. Github: https://humanoid4parkour.github.io/
The Unitree H1 is a bipedal humanoid robot built for advanced mobility tasks. The H1's remote control supports 8 locomotion modes:
Recovery & protection: Active balance recovery via stepping and posture adjustment. Falls trigger self-protection braking to prevent damage.
Step & terrain limits:
The Unitree H1 is a humanoid robot built from aviation-grade aluminum alloys (6061-T6, 7075-T6) and carbon fiber for a lightweight yet strong structure. It stands 180 cm tall, weighs ~47 kg, and features an upright bipedal stance with human-like articulated arms. The head houses MID-360 LiDAR and an Intel RealSense D435i depth camera.
Dimensions: 1805 mm height; 570 mm width; 220 mm thickness. Thigh: 400 mm, Calf: 400 mm, Arm: 338 mm.
Degrees of Freedom (DOF):
Arm Joint Range Limits
|
Side |
Joint Name |
Min (rad) |
Max (rad) |
Min (°) |
Max (°) |
|
R |
shoulder_pitch_joint |
-2.87 |
2.87 |
-164.44 |
164.44 |
|
L |
shoulder_pitch_joint |
-2.87 |
2.87 |
-164.44 |
164.44 |
|
R |
shoulder_roll_joint |
-3.11 |
0.34 |
-178.19 |
19.48 |
|
L |
shoulder_roll_joint |
-0.34 |
3.11 |
-19.48 |
178.19 |
|
R |
shoulder_yaw_joint |
-4.45 |
1.3 |
-254.97 |
74.48 |
|
L |
shoulder_yaw_joint |
-1.3 |
4.45 |
-74.48 |
254.97 |
|
R |
elbow_joint |
-1.25 |
2.61 |
-71.62 |
149.54 |
|
L |
elbow_joint |
-1.25 |
2.61 |
-71.62 |
149.54 |
Leg Joint Range Limits
|
Side |
Joint Name |
Min (rad) |
Max (rad) |
Min (°) |
Max (°) |
|
R |
hip_yaw_joint |
-0.43 |
0.43 |
-24.64 |
24.64 |
|
L |
hip_yaw_joint |
-0.43 |
0.43 |
-24.64 |
24.64 |
|
R |
hip_roll_joint |
-0.43 |
0.43 |
-24.64 |
24.64 |
|
L |
hip_roll_joint |
-0.43 |
0.43 |
-24.64 |
24.64 |
|
R |
hip_pitch_joint |
-3.14 |
2.53 |
-179.91 |
144.96 |
|
L |
hip_pitch_joint |
-3.14 |
2.53 |
-179.91 |
144.96 |
|
R |
knee_joint |
-0.26 |
2.05 |
-14.9 |
117.46 |
|
L |
knee_joint |
-0.26 |
2.05 |
-14.9 |
117.46 |
|
R |
ankle_joint |
-0.87 |
0.52 |
-49.85 |
29.79 |
|
L |
ankle_joint |
-0.87 |
0.52 |
-49.85 |
29.79 |
Torso Joint Range Limits
|
Joint Name |
Min (rad) |
Max (rad) |
Min (°) |
Max (°) |
|
torso_joint |
-2.35 |
2.35 |
-134.65 |
134.65 |
The H1 uses Unitree’s M107 joint motor system, a major advance in humanoid robotics. Each motor delivers up to 360 N·m torque (knee), 220 N·m (hip), and 45 N·m (ankle), with a torque-to-weight ratio of 189 N·m/kg and a compact 107 × 74 mm design. A 3.5 cm force arm can generate forces up to 10,000 N.
| Product | M107 | T-1 | T-2 |
|---|---|---|---|
| Maximum Torque / Pulling Force (3.5 cm arm equivalent) | 360 N·m | 10000 N | 180 N·m |
| Weight | 1.9 kg | 2.26 kg | 2.2 kg |
| Torque or Tension-to-Weight Ratio | 189 | 5263 | 79 |
| Hollow Shaft | Yes | Yes | – |
| Dual Encoder | Yes | Yes | Yes |
| Dimensions (mm) | 107 × 74 | 100 × 130 | 60 × 180 |
The M107 employs low-inertia, high-speed internal rotor PMSM technology for rapid response, precise control, and effective heat dissipation. Features include a hollow shaft for cable routing, dual encoders for position and velocity accuracy, and industrial-grade crossed roller bearings for smooth, precise, and high-load joint operation.

The Unitree H1 uses separate computers for motion control and development:
PC1 – Motion Control (non-user accessible):
PC2 – Development Unit:
Optional expansions:
Max configuration: Base system with dual Intel CPUs (20 cores, 24 threads) plus optional PC3 (10 cores, 12 threads). Supports up to 2 Jetson Orin NX modules (200 TOPS total) and 1 AGX module (275–550 TOPS), for a total of 30 cores, 36 threads, 72 GB RAM, and up to 750 TOPS AI performance.
The Unitree H1’s sensor suite centers on head-mounted LiDAR and depth vision, supported by IMU data and microphone-based audio I/O.
The example below uses the rviz2 tool to visualize the point cloud seen by the Unitree H1's Lidar.
Example: The video below shows a Unitree G1 using an Intel RealSense D435i and Moondream 2 vision-language model for natural-language object detection, depth-based position estimation, and experimental arm planning—showcasing perception workflows relevant to the H1’s depth-camera systems.
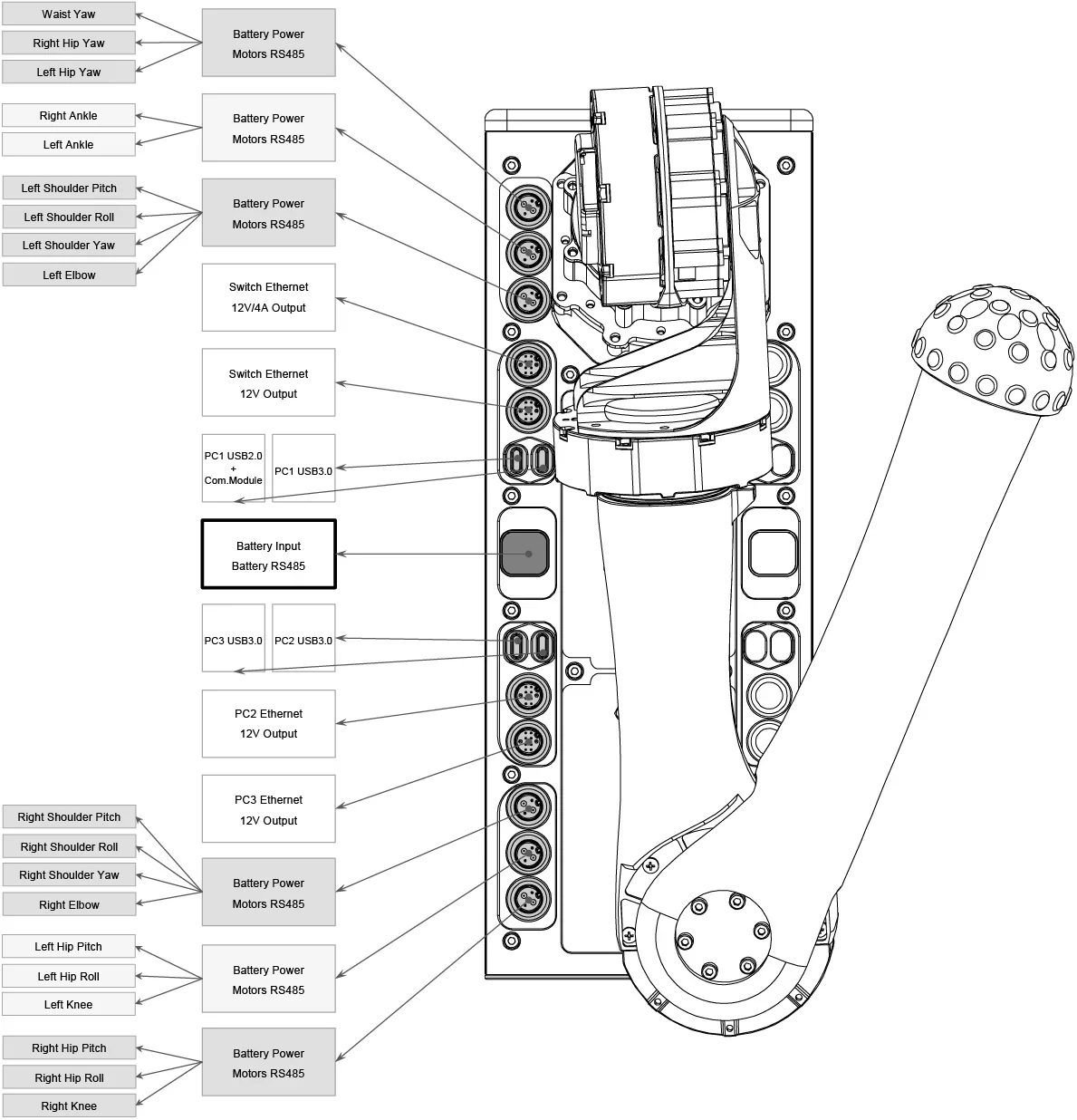
The H1 provides wired, wireless, and power-integrated I/O, including Ethernet, Wi-Fi, Bluetooth, USB, serial protocols, CAN bus, and digital I/O for communication and device integration.
| Interface | Details |
|---|---|
| Ethernet | Dedicated 192.168.123.x subnet; ports on right-side panel. Devices: MCU (.161), Dev PC2 (.162), Optional PC3 (.163), MID-360 LiDAR (.120). Features: 12V-output Ethernet ports, EtherCAT for real-time comms, special adapter cable required. |
| DDS Protocol | Middleware: CycloneDDS; domain-based with configurable IDs; microsecond-level motor control loops; multi-computer coordination. |
| USB | PC1: USB2.0 (peripherals), USB3.0 (high-speed); PC2: USB3.0 (development). USB3 cable included. |
| Serial | RS485: Multiple 3.3V, 5V, 12V, 24V power-integrated lines across PC1/PC2 and battery-motor systems. RS232: PC1/PC2 for legacy devices. |
| CAN Bus | Battery-output CAN interface for automotive/industrial networks. |
| Wireless | Bluetooth: Built-in, 2.4GHz, remote control, mobile app integration. Wi-Fi: Via development units, supports bridging, remote monitoring, hotspot mode. |
| Digital I/O & Power | 12V/4A Ethernet-integrated outputs for high-power peripherals; voltage outputs: 3.3V, 5V, 12V, 24V; battery input/output for power management. |
The Unitree H1’s wireless remote uses 2.4 GHz + Bluetooth dual-mode, works over 100 m, runs 4.5 h per charge, and charges via USB (5V/2A). It’s a two-handed ergonomic controller for full teleoperation.
Below is a table for key control combinations.
| Mode | Button | Description |
|---|---|---|
| General | L1 + A | Enter Damping Mode |
| General | L2 + R2 | Enter Debug Mode |
| Damping Mode | L1 + UP | Enter Ready Mode |
| Damping Mode | L1 + B | Enter Zero Torque Mode |
| Motion Mode | R2 + X | Enter Motion Mode |
| Motion Mode | Left Joystick | Translational velocity command ($v_x, v_y$) |
| Motion Mode | Right Joystick | Yaw angular velocity command ($\omega_{yaw}$) |
| Motion Mode | X | Decrease standing height |
| Motion Mode | Y | Increase standing height |
| Motion Mode | A | Decrease leg lifting height |
| Motion Mode | B | Increase leg lifting height |
| Motion Mode | START | Adjust posture, take a few steps in place, then stop |
| Motion Mode | L2 + Y | Enter Dance Mode and return to Motion Mode |
| Motion Mode | Double Click UP | Handshake |
| Motion Mode | Double Click DOWN | Wave Hand |
| Debug Mode | L2 + A | Perform position control for diagnostics |
| Debug Mode | L2 + B | Stop diagnostics, enter Damping State |

The Unitree H1 is equipped with two batteries with a total battery capacity 864 Wh. Each pack holds 15,000 mAh (432 Wh) at 28.8 V DC.
Each Unitree H1 battery pack measures 120 × 80 × 182 mm and mounts in side compartments under the left arm.
The Unitree H1 runs about 2 hours in mixed-use operation. Runtime varies with:
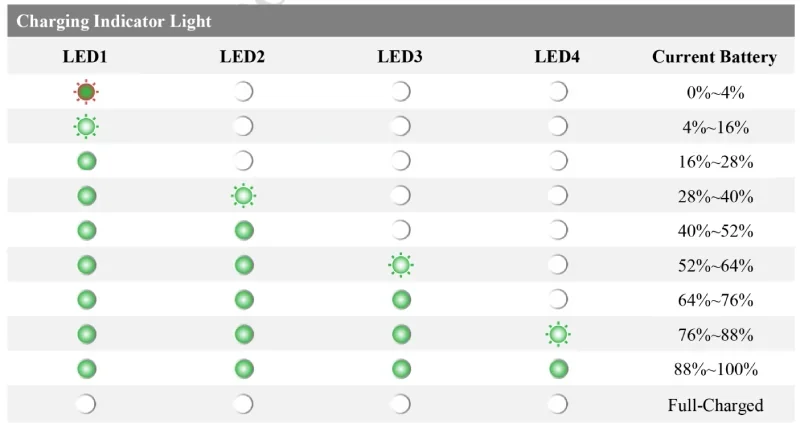
Battery indicators:
Temperature note:
Batteries must cool to room temperature before charging after heavy use to prevent thermal damage and maintain cycle life.
The Unitree H1’s Battery Management System ensures safety with overcharge, over-discharge, short-circuit protection, balanced charging, and temperature monitoring. It offers LED power display, self-discharge control, and automatic power tracking. Certified to IS 16046 (Part 2) / IEC 62133-2 lithium battery standards.
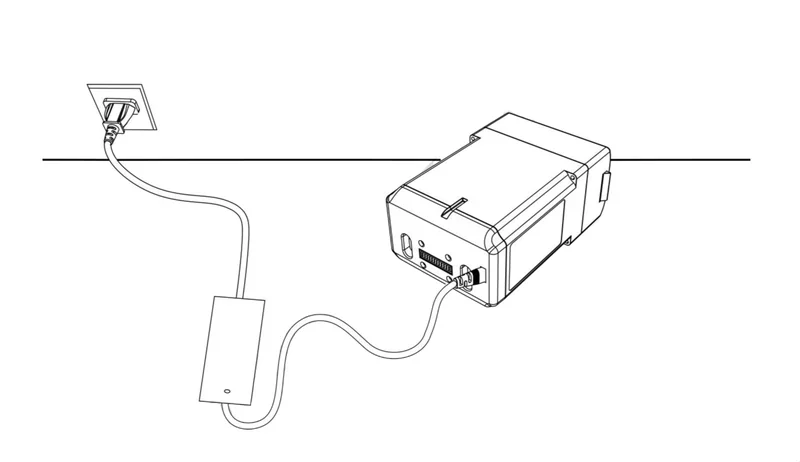
The Unitree H1 charger supports 100–240V AC, 50/60Hz, for global use.
The Unitree H1 fast charger outputs 33.6V DC at 9.0A (302.4W).
The Unitree H1 is a unified platform for programming, simulation, training, and deployment, ensuring code compatibility between simulated and real environments.
Documentation: https://github.com/unitreerobotics, https://support.unitree.com/home/en/H1_developer
/opt/unitree_robotics.192.168.123.xsubnet with fixed IPs: motion control (192.168.123.161), development (192.168.123.162), and sensors (192.168.123.120).Example: The video below shows a Unitree G1 being configured with Unitree SDK2 and then running low-level ankle-swing and high-level locomotion demos — covering safe startup (damp → balanced stand → continuous gait), a lightweight Python wrapper, and hands-on dev practices — illustrating a workflow that also applies to H1.
Example: The next video below shows a Unitree G1 using KISS-ICP SLAM for LiDAR mapping, real-time point cloud and occupancy grid visualization, route planning, and teleop control — demonstrating navigation and mapping workflows applicable to the H1’s ROS2 integration.
Example: The video shows a Unitree G1 teleoperated to collect labeled arm and hand movement data, train a lightweight Cartesian-like control model, and test it in simulation and on hardware—demonstrating data collection, dataset use, and training workflows relevant to the H1’s development pipeline.
Example: Below is a Stanford University's video of the Unitree H1 performing human shadowing tasks — boxing, table tennis, piano playing, keyboard typing, object handling, and door operation.
Example: the Unitree H1 “folding clothes and arranging items” dataset captures 38 episodes (19,000 frames at 50 fps) of daily task execution, with 19-dimensional state vectors, 1280×720 stereoscopic RGB images, and 40-dimensional motor commands for precise action tracking. Stored in Parquet for efficient processing and converted to MCAP for Foxglove visualization, it displays RGB images, joint states, the Unitree H1 URDF in 3D, and DepthAnythingV2 depth images.
| Isaac Gym | Mujoco | Physical |
|---|---|---|
 |
 |
 |
Example: The video below shows a Unitree G1 using a PPO-trained reinforcement learning arm-control policy from simulation to real deployment for directional hand positioning, illustrating Sim2Real workflows and safety practices also applied to H1 development.

| Upgrade Name | Function | MAP Price (USD) | Image |
|---|---|---|---|
| Computing Upgrades | |||
| Intel Core i7 Computing Board | Enhanced development computing power with dedicated i7 processor | $4,450 | 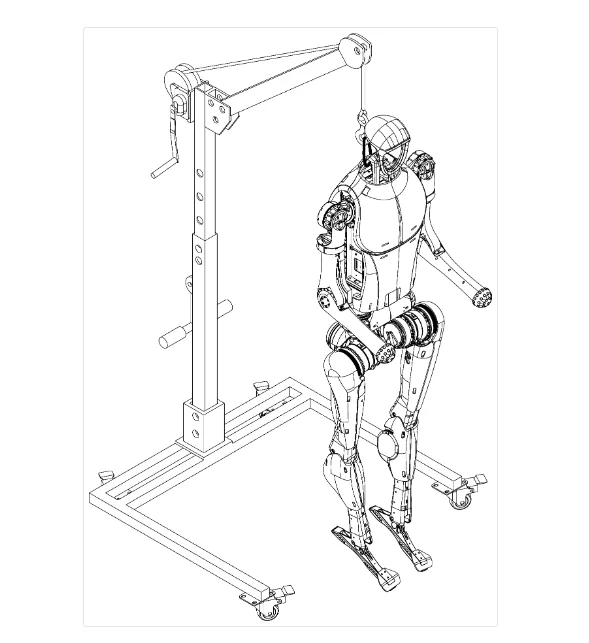 |
| NVIDIA Jetson Orin NX (100 TOPS) | Single Jetson Orin NX assembly | $4,800 | 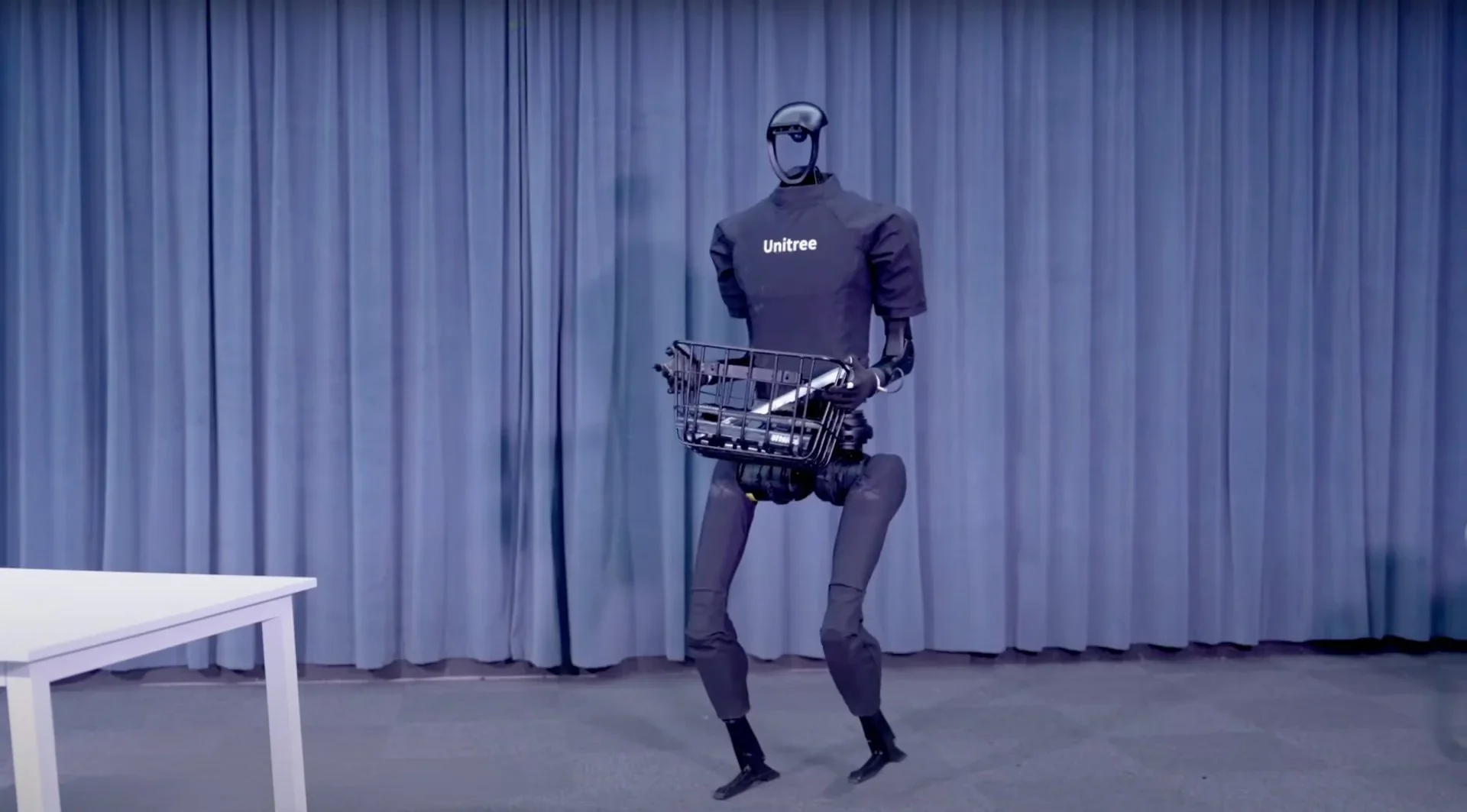 |
| NVIDIA Jetson Orin NX (200 TOPS) | Dual Jetson Orin NX assembly | $9,600 |  |
| AGX Module (275 TOPS) | High-performance computing expansion | $11,050 |  |
| AGX Module (550 TOPS) | Maximum performance computing expansion | $22,100 |  |
| Manipulation Upgrades | |||
| Unitree Dex5-1 Dexterous Hand |
The Dex5-1 series is a dexterous robotic hand line with two variants: the standard Dex5-1 and the Dex5-1P with integrated tactile sensing. Both have human-like articulation with 16 DOF across five fingers. Key Features
Specifications
Articulation
Sensing (Dex5-1P)
Control & Feedback
|
$10,500 |  |
| Inspire Dexterous Hands RH56DFQ-2R, RH56DFQ-2L (third-party) |
Dexterous hands parameters:
Wrist joint motor parameters:
|
$8,900 |  |
| Power and Control Accessories | |||
| Additional Battery Pack | Extended operational runtime and hot-swap capability | $1,580 |  |
| Additional Remote Control | Backup or multi-operator control capability | $590 |  |
| Fast Charger | Rapid battery charging capability | $590 |  |
| Support Equipment | |||
| H1 Gantry | A debugging protection bracket for the H1 for safe product development. | $1,290 |  |
| Replacement Components | |||
| Inspire Hand Four-Finger Motor (LAF10-024D) |
A spare part for repair.
|
$399 |  |
| Inspire Hand Thumb Motor (LASF10-024D) |
A spare part for repair.
|
$419 | 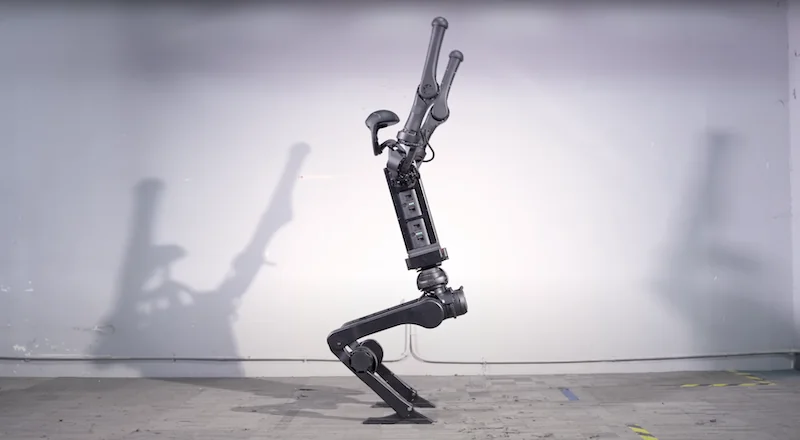 |
The Unitree H1 requires pre- and post-operation inspections for reliability and longevity of this robotics technology.
Pre-Operation (Power Off)
Post-Operation (Power On)
Cleaning
Battery Care
Software
The H1 warranty starts on delivery and covers manufacturing defects under normal use for personal (non-resale) purchases.
The warranty period is 12 months.
Valid only if:
The H1 warranty covers:
The H1 warranty excludes damage from:
Usage:
Environmental:
Development:
Physical damage signs:
Customer responsibilities:
Unitree responsibilities:
Service limits:
Liability limits:
Terms: https://www.unitree.com/terms
Support channels:
Documentation & technical resources:
Developer & open source tools:
unitree_sdk2, unitree_ros2, unitree_mujocoMobile app (Unitree Explore):
Training & educational resources:
Workflow integration:
The Unitree H1 is priced at $94,905.00, including:



Update your browser to view this website correctly. Update my browser now















