
Quadruped bionic robots are becoming more and more popular nowadays. While early models of bionic dogs were rather expensive and could hardly be regarded as consumer-level devices, being designed mainly for industrial and development purposes, today there are a number of companies making relatively affordable robot dogs for home use. A bionic pet can make a great family companion yet being a powerful educational and research tool providing wide opportunities for secondary development.
This is Top 3D Shop, and today we are going to take a closer look at the Unitree A1 quadruped bionic robot and its capabilities.
Founded in 2016, the Chinese-based Unitree Robotics company focuses on in-house development of both industrial and consumer bionic quadruped robots, their core components and software. The company’s objective is to expand the market for consumer robots, making them available not only for professionals but for home users as well. Unitree Robotics is one of the first companies to sell commercial bionic robots, and its most affordable Go1 model combines cutting-edge technologies and a reasonable price. Complemented with additional equipment, such as a lidar, ultra wide-angle camera, searchlight, or even a robotic arm, Unitree robots can be adapted for performing various tasks, such as territory patrol, rescue service, goods delivery, and more.

The Unitree A1 is an open-source system and was designed as an educational platform for developers and students learning robotics. This compact and agile robot dog features an outstanding dynamic balancing algorithm for excellent motion stability, and it is one of the fastest in its class reaching a maximum speed of 3.3 m/sec.
Let us have a look at the key features of the Unitree A1 bionic quadruped dog.
The A1 is a 12-DOF robot, its joints powered by 12 high-performance yet lightweight motors with a maximum torque of 33.5 Nm and a rotational speed of 21 rad/sec. Each motor weighs 605 g and features an industrial-grade cross-roller bearing.

The robot is equipped with the Intel RealSense D435i depth camera. It has an RGB, IR, and a pair of depth sensors. The camera allows the A1 to measure the distance within the range of 0.3–10 m and transmit real-time video to PC or mobile app with HD resolution at 30 fps.

The Unitree A1 features vision-based autonomous object tracking and obstacle avoidance functions. It can detect and follow the specified person within its visual range. In obstacle avoidance mode, the dog is capable of detecting obstacle shapes within 0.8 m, adjusting its body position to dodge them.

To improve stability on all terrain types, the robot is equipped with four integrated foot force sensors detecting ground contact and helping the dog quickly regain its balance in case of a sudden impact. The rubber foot pads are dustproof and waterproof and can be replaced when worn out.

In the video below you will see the process of unboxing the robot and turning it on.
Before pressing the power switch button, the user needs to place the fully charged battery into the battery compartment and properly position the robot on a flat surface, with its legs folded and all the joints pressed to the floor. When the power is on, the A1 runs a self-test and stands up ready for commands.
As for the battery, its capacity is 4200 mAh, 21.6 V. Designed specifically for the A1, it sports an advanced battery management system with a multistage protection and the function of displaying the current power level with 4 LED indicators. The battery runtime is from 1 to 2.5 hours depending on the selected mode.

The Unitree A1 has three operation modes, namely Normal mode 1.0, Sport mode 2.0, and Sport mode 3.0.
The Normal mode is entered automatically when the robot is turned on. In this mode the user can control the dog’s movements, but the manufacturer does not recommend using this mode, so it is better to switch to the Sport 2.0 or 3.0 mode.
In the Sport mode 2.0 you can switch between walking and running modes and control various dog’s actions, including combined movements, such as rolling, backflipping, dancing, etc.
The Sport mode 3.0 is for fast walking, which is similar to the 2.0, as well as stair climbing. The robot is capable of climbing up and down the stairs with a maximum step height of 12 cm.
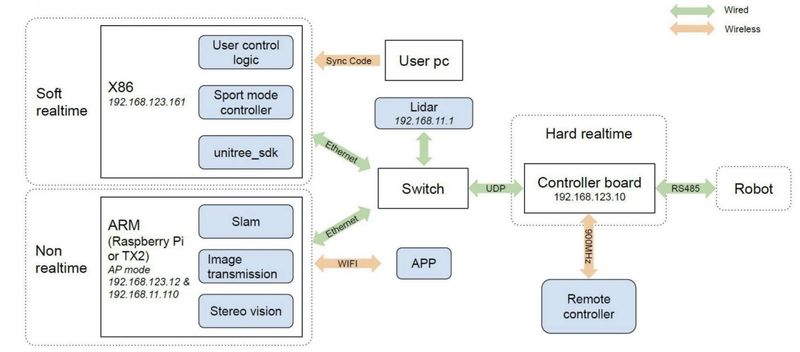
Speaking of the A1’s architecture, there are three control boards. The first one is the non-realtime perception control computer, which is Raspberry Pi 4B with 4 GB of RAM. It can be upgraded to the NVIDIA TX2 or NX board. The board has an HDMI port, an Ethernet port, and two USB ports (2.0 and 3.0). This perception control unit is mainly used for receiving camera data and performing the SLAM function. For the latter the robot should be equipped with an optional 2D or 3D lidar installed on top of the dog’s torso and connected with an Ethernet cable. The board is also used when controlling the A1 via the mobile app and performing object tracking.
The motion control board is an ARM-based computer with a 4-core CPU and 4 GB of RAM, running on Ubuntu 16.04. It features the same I/O ports as the Raspberry Pi board, that is an HDMI port, an Ethernet port, and two USB ports. The motion control board is a soft-realtime system and it is used to sync with the PC and run the code written by the user for the dog’s Sport modes 2.0 and 3.0.
The third is the hard-realtime main control board which is not normally employed by users for secondary development purposes. It is connected with the remote controller via Bluetooth and controls the robot’s 12 motors.
The Unitree A1 can be operated via a Bluetooth remote controller with two joysticks and functional buttons. Various button combinations are used to control the dog’s movements. Besides common actions, like walking forward / backward or turning left / right, the A1 can perform quite a lot of complex tricks, due to its high-grade motors and excellent balance. It can, for example, roll over and get back on its feet, backflip, crawl, dance, and do a lot of other stuff.

The remote controller has a flat space in the middle where you can place the mobile phone and use it for the real-time image transmission from the dog’s onboard camera while controlling the A1 with the joystick.
There is also an additional remote controller with the only function of emergency power off.
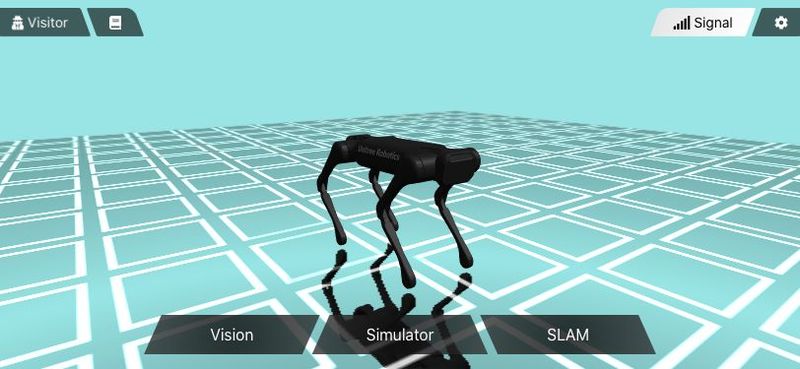
The Unitree mobile app is available for Android and iOS and allows operating the A1 and receiving live camera data. There are three main sections, which are Vision, Simulator, and SLAM, and the buttons for them are in the bottom of the home screen.
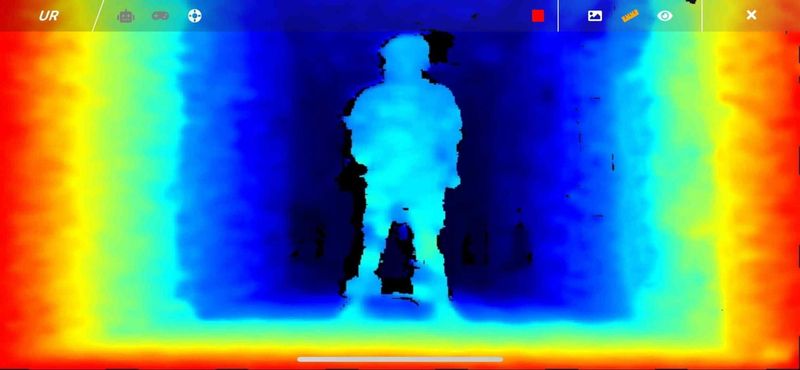
From the Vision menu, the user gets access to the RealSense camera information, which can be displayed in Image or Depth mode, the latter showing the distance between the robot and the object. The user can also activate object tracking by selecting the person to be followed on the screen.
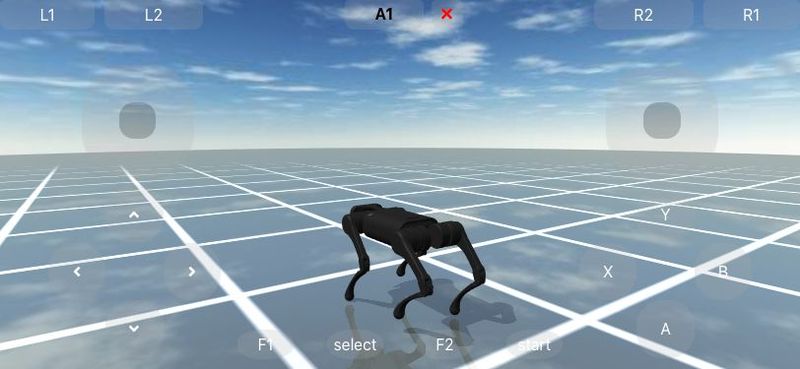
The Simulation interface allows simulating basic control functions without connecting to the real dog.
In the SLAM section the user controls the robot while it is doing SLAM. Equipped with a lidar, the A1 can navigate autonomously to the selected destination point, avoiding obstacles, tracing the optimal route. and building the live map of the environment.

As the A1 is an open-source system, on the Unitree Robotics Github page you can find several SDKs for secondary development.
The unitree_legged_sdk is used for both high-level and low-level control, which means you can give the robot instructions related to its movements, travel speed, etc. as well as control each joint directly. The SDK supports C++ programming.
The unitree_ros contains ROS packages for several Unitree robots, including the A1.
The Unitree A1 is a versatile quadruped robot boasting great balancing and speed performance as well as durability in a fairly compact and lightweight body. It is equipped with three powerful computers and provides unlimited opportunities for secondary development. Being equipped with optional external devices, the A1 can be employed for various tasks, such as search and rescue, environmental inspection and patrol, and more.

Update your browser to view this website correctly. Update my browser now





Write a comment