
The Chinese-based Unitree Robotics company is specialized in development and manufacturing of bionic quadruped robots and robotic arms. Having set a goal to make bionic robots accessible to consumers, Unitree engineers design proprietary core components for various robot models both for consumer and industrial markets. The company’s Go1 became the first really affordable robot dog for home use, but Unitree also has high-performance industrial-grade quadrupeds in its lineup, and the Aliengo model is one of them.
This is Top 3D Shop, and today we are going to review the Unitree Aliengo industrial quadruped bionic robot.
The industrial-grade Unitree Aliengo bionic dog is a high-performance quadruped, showing excellent stability even on rough terrain and reaching the maximum speed of 1.5 m/s. With an impressive payload of 10 kg, the possibility to connect various external devices, and numerous opportunities for secondary development, the Aliengo suggests a variety of application scenarios in different fields. The dog’s body is made of polymer plastic, carbon fiber, and aviation aluminum, and its fuselage is designed to resist serious impacts and collisions. Let us take a look at the key features of the Aliengo quadruped robot.
The Unitree Aliengo adopted a new power system comprising 12 joints powered by 12 servo motors with a maximum torque of 40 Nm, maximum joint velocity of 26.5 rad/sec, and 15-bit encoder resolution. Each motor has a reducer wear and excessive torque protection which makes for durability and longer lifespan. A motor weighs about 900 grams. The Force control technology provides full three-axis posture and position control for the robot to easily adapt to any terrain type and quickly regain balance.

Machine vision is based on two Intel RealSense D435 depth cameras and a visual odometer. The wide-angle cameras have a global shutter image sensor and 1280 x 720 resolution support. The visual odometer makes for performing the visual SLAM function.

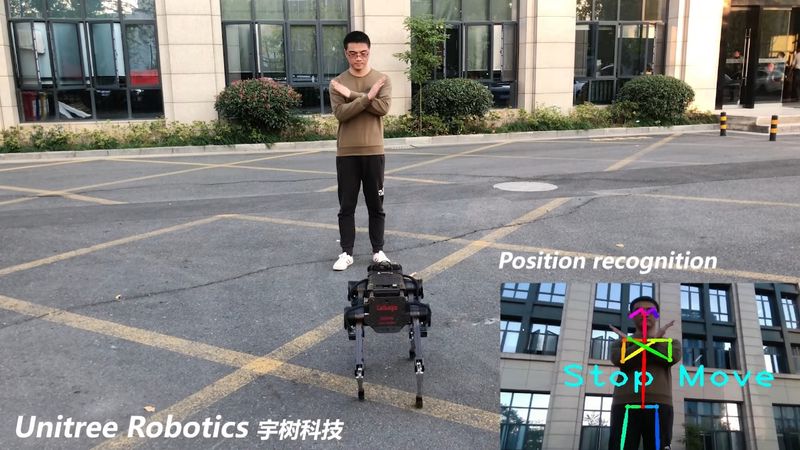
The machine vision system allows for building 3D maps of the environment and navigation planning. Another function that makes use of the cameras is body posture recognition and object tracking. The Aliengo is capable of recognizing human postures and answering with corresponding movements. It also uses posture recognition for object tracking in a crowded place, focusing on a specific gesture to keep track of the selected person.
Equipped with a specially developed Li-Ion battery with a capacity of 12600 mAh, the Aliengo can operate up to 4.5 hours on a single charge. The advanced battery management system provides overcharge, circuit, overheat, and other factors protection to ensure stable battery operation, and constantly monitors battery status.

As an industrial robot, the Unitree Aliengo features wide connectivity options including two HDMI ports, two Ethernet ports, 2 USB 3.0 and a USB 2.0 port, and an RS-485 port. The interfaces allow connecting optional external modules that enhance the robot’s functionality and versatility.

The bionic dog provides wide opportunities for secondary development, supporting C / C++, Python, and ROS programming, and allows for both high-level and low-level control. It includes controlling the dog’s movements as well as reading sensors’ data and defining position, velocity, and torque of each motor separately. The Aliengo is equipped with a dual main controller including NVIDIA TX2 perception control board with 8 GB of RAM, running on Ubuntu 18.04 and communicating with the machine vision system, and the Intel Core i5 / i7 motion control unit with Ubuntu 16.04 system.
After unboxing the robot, make sure that the battery is fully charged, and insert it to the battery compartment. Place the dog on the floor with its legs folded, short press then long press the Start button, and wait for the Aliengo to boot. After a self-test, the robot will rise to its feet and enter the Normal operation mode.

Credit: stokeseducation.com
The Unitree Aliengo features two operation modes, which are Normal and Sport mode 3.0. The robot enters the Normal mode as soon as it is turned on. The manufacturer recommends switching to Sport mode to operate the robot. To do it, you need to press the L1 + Start buttons on the remote controller — the robot will start crawling and then stand up. When it does, press Start and push the left joystick forward to start walking. In Sport mode 3.0 the Aliengo can climb the stairs with a step height of up to 18 cm.
To switch between the Normal and Sport modes, press the combination of L2 + Start buttons while the dog is standing.
The Unitree Aliengo is operated via a Bluetooth remote controller. Using functional button combinations and joysticks, you can make the robot perform a lot of special movements, such as running in all directions, crawling, jumping, rolling over, backflipping, and a lot more. It is also capable of obstacle avoidance and climbing the stairs and slopes with a maximum angle of 25°.

The remote controller can be connected to a mobile phone with the installed Unitree app for more convenient operation with real-time image transmission from the dog’s cameras.
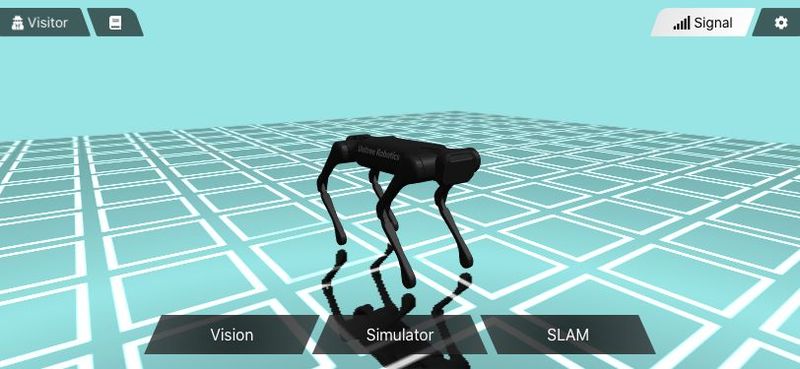
The application for operating the Unitree Aliengo can be downloaded from the Unitree website both for Android and iOS devices. The app allows receiving real-time data from the Aliengo cameras, activates object tracking mode and posture recognition. In the SLAM menu, the user can operate the robot doing SLAM, and there is also a simulation mode that does not require a physical robot dog to get familiar with basic control functions, such as running or turning.
As the Aliengo features human posture recognition, you can use gesture control to operate the robot.
The Unitree page on Github contains several SDKs for the Aliengo, such as unitree_legged_sdk, unitree_ros, or aliengo_sdk. The packages provide both high-level and low-level control of the robot and support C / C++, Python, and ROS.

The Unitree Aliengo is an industrial-grade bionic quadruped dog combining a compact size with an impressive payload capacity and durability. Perfect stability and balancing performance allow using the Aliengo in different environments, no matter the terrain type. Due to its flexible API tools and the ability to connect optional equipment, the robot can be used for various industrial tasks in conditions that can be potentially dangerous for humans.

Update your browser to view this website correctly. Update my browser now





Write a comment