
Bionics is one of the most interesting sections of robotics, so different companies develop bionic robots resembling various animals, dogs being quite popular. Most of them are pretty expensive and not targeted at the consumer market. The Go1 quadruped robot from Unitree Robotics has become the first commercially available consumer model at a fairly affordable price.
This is Top 3D Shop, and today we are going to review the Unitree Go1 bionic dog, find out the differences between the three modifications of the Go1, and see what the robot is capable of.
The Chinese-based Unitree Robotics company was founded in 2016 by Wang Xingxing. Being a graduate student at Shanghai University, Wang Xingxing developed the XDog, a full-degree-of-freedom quadruped that could move forward, backward, and sideways. The company’s founder said his goal was to make legged robots as simple and affordable as smartphones. The first Unitree robot dog, the Laikago, was released in 2017 as a research platform for scientists and engineers.

Today the company specializes in development and production of both industrial and consumer high-performance quadruped robots and robotic arms. Unitree Robotics is focused on research and development of cutting-edge technologies and owns over 100 patents in the field of robotics. The company's bionic robots find their use in agriculture, industry, as well as exploration, security patrol, rescue services, education, and other fields.
There are three versions of the Unitree Go1 quadruped, namely Go1 Air, Go1 Pro, and Go1 Edu. They all share the same appearance and mechanics, but differ in hardware and programming capabilities. The most advanced Go1 Edu version is the fastest of the three and provides a lot of development possibilities being a great research and educational platform for students and engineers. In the table below you will find all the differences between the three versions.
|
Version |
Go1 Air |
Go1 Pro |
Go1 Edu |
|
Super sensory system |
1 set |
5 sets |
5 sets |
|
Processor |
1 * (4 * 1.43 GHz 128-core 0.5T) |
3 * (4 * 1.43 GHz 128-core 0.5T) |
2 Nano + 1 Nano / 1 NX |
|
Adapter |
24 V, 4 A |
24 V, 6 A |
24 V, 6 A |
|
Payload |
~ 3 kg |
~ 3 kg |
~ 5 kg (max ~ 10 kg) |
|
Speed |
0–2.5 m/s |
0–3.5 m/s |
0–3.7 m/s (max ~ 5 m/s) |
|
Graphic processing API |
+ |
+ |
+ |
|
Research programming API |
– |
– |
+ |
|
Human recognition |
– |
+ |
+ |
|
APP top view |
– |
+ |
+ |
|
4G or 5G |
– |
– |
+ |
|
Foot force sensor |
– |
– |
+ |
|
Multifunctional extension interface |
– |
– |
+ |
|
Lidar |
– |
– |
optional 2D or 3D |

The Unitree Go1 is a small budget-friendly quadruped robot that behaves like a real dog, following its human master and performing various tricks. It is speedy and agile, can climb the stairs, and feels confident on various terrain types.
Let us have a look at the key features of the Go1.
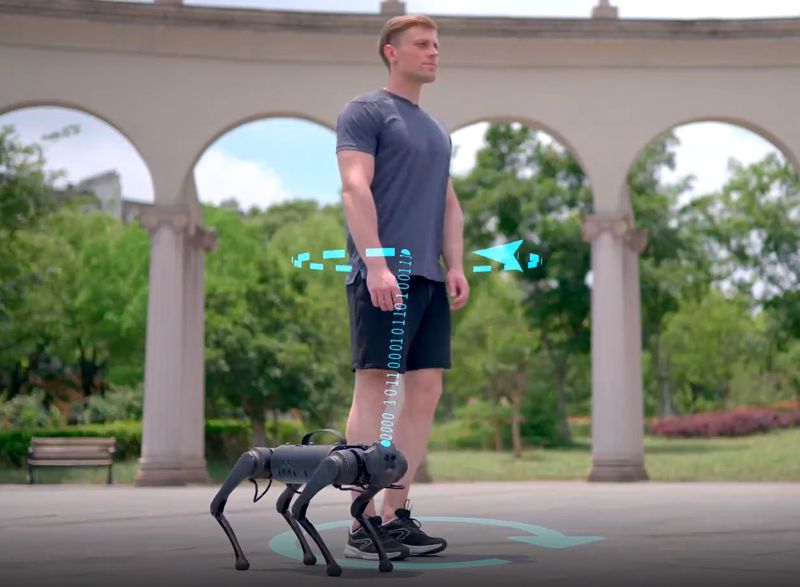
The system is based on the proprietary wireless vector positioning and control technology and allows the robot to walk by the side of a human instead of following him like most quadrupeds do. It is much more convenient as there is no chance to lose sight of the robot, and the user can always choose an easier route for the Go1 in a complex environment.
This system includes one or five sets (depending on the Go1 version) of fish-eye stereo depth cameras with a viewing angle of 150 x 170°, three sets of hypersonic distance sensors, and powerful AI post-processing. All this allows the robot to recognize and efficiently avoid obstacles and navigate autonomously in complex environments.

The Go1 can travel at an impressive speed of 17 km/h, climb the stairs with a maximum step height of 100 mm, and perform complicated tricks, such as backflips. Flexible adaptive joints are equipped with low-noise lightweight motors with a torque of 23.70 Nm at the body and thighs and 35.55 Nm at the knees. The knee joints have a built-in pipe cooling system for efficient heat dissipation.
The advanced AI system is based on a 16-core processor combined with a 384-core, 1.5 TFlops GPU. The Go1 Edu is equipped with 3 NVIDIA Jetson Nano boards, one of which can be replaced with Jetson NX board for the use with an optional 2D or 3D lidar.
For better stability and shock resistance, the Go1 Edu version is equipped with four foot force sensors measuring the impact upon contacting the ground.
The Li-Ion battery with a capacity of 6300 mAh and a voltage of 21.6 V features an intelligent management system monitoring the battery status and protecting the battery from overcharge, overheat, and other negative factors for safe and long-life operation. The LED indicators display the current battery level.

To start working with the Go1, you need to insert the fully charged battery in the battery compartment and make sure that the robot is in the right position — lying on a flat surface with all the joints on the floor. To turn on the Go1, press the power button twice, holding it about 3 seconds for the second press, and wait for the Go1 to complete a self-test. As soon as it is done, the dog will stand up and be ready to interact.

The Unitree Go1 comes with a remote controller looking very similar to the one you use with your game console, with two joysticks and function buttons. The left joystick controls the forward / backward and side movements, and with the right one you make the dog raise or lower its head and turn left or right. With the controller, the user can enter the obstacle avoidance, climbing, and auto following modes as well as make the robot perform various actions using certain button combinations.

One more part of the remote control module is the label controller. It can control the dog’s movements and switch between the standing, crouching, and resting modes by double-pressing the POW button. The label controller is also used to enable the side-following mode. Attach it to your waist belt for the dog to move by your side.

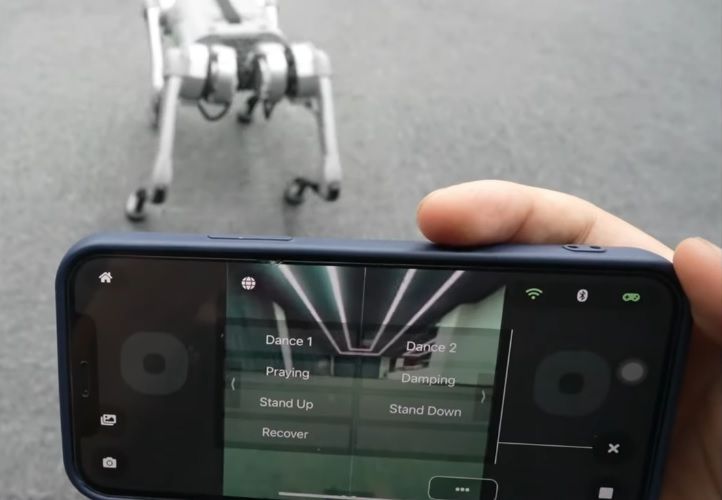
Unitree offers a mobile app supporting both Android and iOS to control the Go1. Once the app is installed on your phone, you need to connect to the robot’s Wi-Fi network with 8 zeros as a password. On the bottom of the main screen there are Vision and Simulator buttons, the latter turning on the simulation mode of controlling the dog’s movements, but there is not much you can do here.

The Settings button provides the information about the network connection status, joint motors temperature and rotation angle, or battery status in real time. Besides, being connected to the joystick, the app can check if all the buttons work correctly. It is also possible to change the color of LEDs on the dog’s head.

By pressing the Controller icon in the top right corner of the screen, you enter the control mode and can operate the Go1 using the virtual joysticks and buttons on the screen.
The images from the dog’s cameras are transmitted to the app screen in real time. The user can switch between the cameras, make snapshots, and save them to the album.
Equipped with an optional 2D or 3D lidar, the Go1 Edu can realize the SLAM function, building the map of the environment and tracing the most efficient routes. The SLAM function can also be controlled via the app.

For the Edu version of the Go1 robot, Unitree offers several software development kits for students and engineers to develop different applications enhancing the quadruped’s capabilities in various fields.
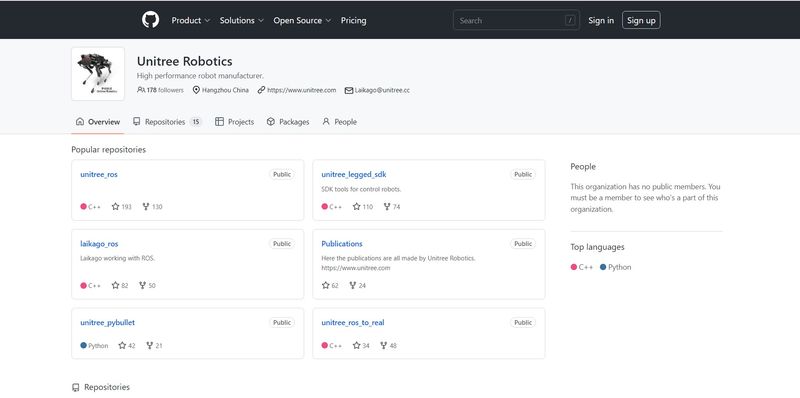
The unitree_legged_sdk allows you to perform high-level control, such as the dog’s body movements, as well as low-level control, like the exact positions of the joints.
With the ros_to_real package the user can control all the joints as well as the robot’s walking direction and speed. It supports C++ and Python and comes with sample programs.
The Unitree Go1 quadruped robot is one of the most affordable consumer bionic dogs featuring a unique side-follow system and impressively high speed. It can be a great everyday companion for all family members, while the Go1 Edu model is also a powerful and versatile educational and development platform.

Update your browser to view this website correctly. Update my browser now






Write a comment